Software
Im Februar habe ich ein erstes Programm für die Linienfolge fertig geschrieben und getestet. Da die Grundidee davon nicht so richtig funktionieren wollte, habe ich mir eine neue Idee überlegt und mit Hilfe dieser Idee konnte unser Bot dann schon gut der Linie folgen. Anfangs hatte ich noch einige Schwierigkeiten, da das der Roboter sobald ich ihn gestartet hatte einfach nur geradeaus gefahren ist. Dies ging so lang weiter bis ich dann bemerkt habe, dass man ihm nicht nur sagen muss was er tun, sondern auch was er nicht tun soll. Danach reagierte er zumindest mal auf die Werte der Sensoren. Um auch noch über die Abstände in der Linie zu kommen, habe ich dann letztendlich ein Programm geschrieben bei dem der Roboter so lange fährt, bis er auf der einen Seite auf die Linie kommt und sich dann dreht, bis er wieder geradeaus weiter fahren kann. Das Ganze funktioniert gut, nur leider fährt der Bot noch nicht mit einer konstanten Geschwindigkeit, weshalb er teilweise stecken bleibt oder schon über die Linie gefahren ist, bevor er sie überhaupt richtig erkennt. Dieses Problem werde ich demnächst mit Hilfe der Encoder zu lösen versuchen.
Elektronik
Ich habe im Monat Februar ein weiteres Motorboard gelötet nachdem eines leider kaputt gegangen ist. Auch habe ich versucht unserem Programmierer konstruktive Unterstützung zu leisten, indem ich mir mögliche Lösungen für die Linienfolge überlegte. Dem fast fertigen Roboter habe ich die nötige Elektronik eingebaut, nachdem ich sie aus dem Prototypen ausgebaut hatte. Wir, insbesondere ich, waren sehr froh dass die Elektronik von Anfang an ihre Pflicht tat und bislang einwandfrei funktioniert. Schwierigkeiten bereitet mir allerdings noch das endgültige Einbauen der Elektronik, da dem Roboter, laut unserem Mechaniker, noch einige Teile fehlen. Dadurch hatte ich zu wenig Platz um sämtliche elektronischen Bauteile fix auf den Roboter zu montieren. Ich denke aber, dass dies auf dem fertigen Roboter kein Problem darstellen sollte.
Mechanik
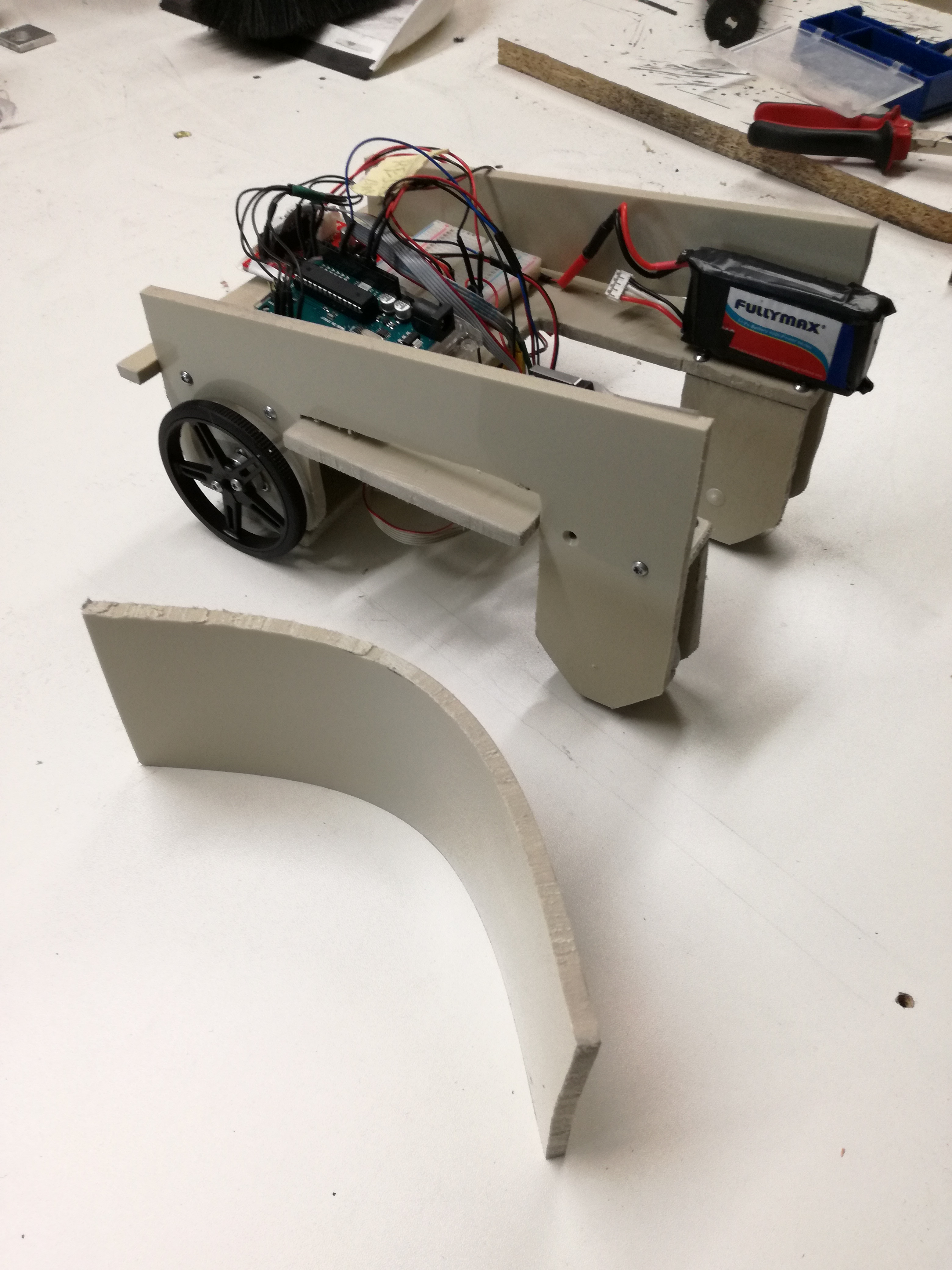
In diesem Monat stellte ich die Fahrmechanik des Bots fertig. Die Motoren, Sensoren, Räder und die Elektronik sind somit befestigt, damit wir das Programm des Programmierers testen können. Wichtige Teile für das Balleinfangsystem liegen zudem für die Weiterverarbeitung bereit. Dank dem CAD könnte ich die einzelnen Platten passgenau zuschneiden und zusammenschrauben. Die Auffangplatte benötigte spezielle Aufmerksamkeit. Diese Platte musste ich ausschneiden und in einem 6.5 cm Radius Rund biegen. Dafür erwärmte ich sie im Backofen mit 120° und bog sie, um eine Schüssel mit dem richtigen Durchmesser. Es war schwierig die Platte im richtigen Zustand zu halten, denn sie verformte sich immer wieder in den ursprünglichen Zustand zurück. Um dieses Problem zu lösen, spannte ich sie mit einem Spanngurt bis sie wieder auskühlte.