Nachdem die Vorbereitung und die Durchführung des 24h-Wettbewerbs die Mithilfe aller Vereinsmitglieder benötigt hatte, konnten wir unser Hauptaugenmerk wieder gänzlich auf das Objekt unserer Begierde lenken, dem PuckCollect-Roboter. In einem Monat muss „Puckman“ seine Aufgabe zuverlässig und effizient bewältigen können. Alle Vorzeichen deuten darauf hin, dass wir den straffen Zeitplan einhalten können.
Bau des Wettkampfroboters – CNC ist die Lösung!
Wie im Januarbericht des Challengeteams nachzulesen ist, stehen für den Bau des Wettkampfroboters alle Lampen auf grün. Es bedurfte noch eines Zwischenschrittes, nämlich der Fertigstellung des CAD-Modells. Dieses ist umso wichtiger, da wir uns entschlossen haben, die Acrylglasteile von Puckman mithilfe einer CNC-Fräse zu formen. Das CNC-Fräsen hat gegenüber der konventionellen Handarbeit den Vorteil, dass die Teile millimetergenau gefräst werden. Natürlich spielte die Entlastung unserer Mechanikfraktion auch eine gewisse Rolle.
Die CNC-Fräse wird uns von der HTW Chur (Hochschule für Technik und Wirtschaft) zur Verfügung gestellt. Herzlichen Dank!
Der nächste Schritt ist das Zusammenbauen des Roboters. Die Elektronik- und Programmierungsspezialisten drängen darauf, ihre Erzeugnisse am Wettkampfroboter auszuprobieren.
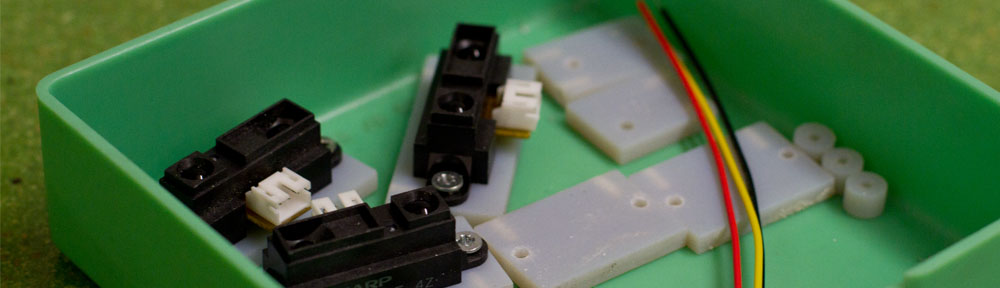
Platine und Phototransistor – die Elektronik ist auf dem Vormarsch
Nachdem wir mit etlichen Fehlbestellungen zu kämpfen hatten, ist das Licht am Ende des Tunnels nun doch in Reichweite. Die Platine ist fertig gelötet und somit bereit für erste Funktionstests.

Da wir uns zum ersten Mal mit der Entwicklung einer Platine beschäftigten, hatten wir einige Probleme, die dank tatkräftiger Unterstützung des WM-Teams behoben werden konnten. Nichtsdestotrotz erscheint es uns sinnvoll, eine Liste mit Verbesserungen aufzustellen. Unter anderem gehört darin: die frühzeitige Teilesuche und -bestellung, damit die Platinenentwicklung reibungsloser ablaufen kann; die mehrfache Überprüfung aller Bestandteile, damit Fehlbestellungen in Zukunft vermieden werden können.
Des Weiteren scheint die Achillesferse des letztjährigen Wettkampfroboters beseitigt zu sein: dank dem Austausch des unzuverlässig arbeitenden Farbsensors durch einen Phototransistor konnte die Fehlerquote beim Sortieren der Pucks massiv gesenkt werden. Dies lässt auf ein deutlich besseres Abschneiden bei der RobotChallenge hoffen.