Fortschritte beim Prototypen in der Mechanik
Diesen Monat hat sich die Mechanik im Soccer-Team vor allem mit dem Prototypen beschäftigt.
Es wurden fast alle Komponenten an den Prototypen befestigt. Kleine Schwierigkeiten traten vor allem beim befestigen des Dribblers auf. Zunächst schnitt sich der Dribblermotor mit der Halterung des Rades. Dies konnte aber gelöst werden, durch Kürzung der Halterung des Rades. Die Dribblerrolle wurde gekürzt und angemacht.
Zudem wurden ein paar Schönheitsfehler beim Prototypen behoben, welchen nun den Prototypen besser wirken lassen. An der Weltmeisterschaft wird die Stärke unseres Kickers kontrolliert werden. Dort darf er dann eine gewisse Särke nicht übertreten. Zu diesem Zweck haben wir einen Kicker-Test aus Plexiglas gebaut.
Die nächsten Schritte der Mechanik sind den Prototypen fertig zu gestallten und mit den Endmodellen unserer Roboter anzufangen.
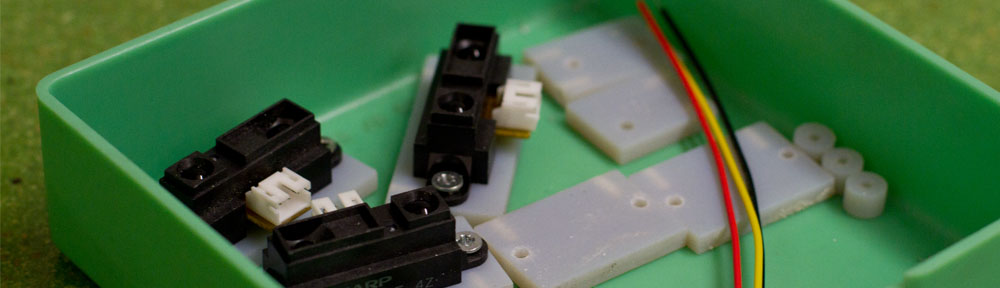
Neue Sensoren in der Elektronik
Letztes Jahr wurden für die Ballerkennung Sensoren verwendet, die eine zu kleine Reichweite haben. Im Moment suchen wir somit nach geeigneteren Sensoren, welche unsere Anforderungen besser erfüllen.
Weiter ist die Elektronik noch beschäftigt mit dem Unterbodenboard. Das Board, welches bestückt wurde, bereitete Probleme. Jetzt starten wir einen neuen Versuch.
Die Strategie
Diesen Monat ging es in der Software um die Ausarbeitung der Strategie des Stürmers. Nach der Programmierung der ersten Ideen, tauchten Probleme auf. Der Roboter konnte sich nicht wie gewünscht ausrichten und begann auf der Stelle unkontrolliert zu drehen. Durch Mithilfe von älteren Mitgliedern stellte sich heraus, dass man den Kompass, den wir verwenden, richtig kalibrieren muss. Nach dieser Umsetzung traten diese Probleme nicht mehr auf, und der Roboter fuhr wie gewünscht. Im Moment sind wir noch am testen, ob es aber wirklich zuverlässig ist. Dannach können wir das Goale schiessen in die Praxis umsetzen.