
Das Challengeteam bereitet sich intensiv für die nächsten Austrian Open vor.
Trémaux’s Algorithm
Wir haben uns darauf konzentriert, uns Strategien zu überlegen. Wir planen, dieses Jahr das Labyrinth mit dem Roboter aufzuzeichnen und eine Karte zu erstellen, welches uns einen guten überblick vom Feld verschaffen kann. Dazu werden wir unsere Bewegungen mit einem Accelerometer aufzeichnen und mit den Werten der Encoder, mithilfe von Kalman-Filtering, vergleichen. Wir haben festgestellt, dass wir die uns bekannten Kompasssensoren dazu verwenden können. Dies wird uns, sobald wir unsere neu designeten Board besitzen, die Arbeit erleichtern, da wir uns nicht in neue Sensoren einarbeiten müssen. Mit der Karte des Labyrithes können wir dann einen einfachen Algorithmus (Trémaux’s Algorithm) anwenden, um sicherzustellen, dass wir überall durchfahren und keine Opfer verpassen.
Neues Board
Wir habe angefangen mit Eagle unser Board zusammenzustellen. Den Prozessor, den wir benutzen werden heisst ATSAM4E16E, denn er hat die benötigten Pins. Auf den Roboter kommen 6 Infrarotsensoren. Einen vorne, einen hinten und auf den Seiten je zwei. Mit dieser Technik können wir uns gut an der Wand ausrichten.Um die Wärmequellen zu finden und zu erkennen benutzen wir zwei Wärmesensoren, je einer beiden Seiten. Um die Technik des Algorithmus ausführen zu können, brauchen wir einen Kompass um uns orientieren zu können.
Erste Designs Ideen für den Roboter
Wir haben diesen Monat mit dem CAD begonnen. Diesmal haben wir zuerst die Motoren, Servos und die Drehscheibe für die Rescue-Kits konstruiert, da diese Komponenten schlussendlich die Grösse des Roboters bestimmen. Wir hatten ein paar Probleme beim erstellen der Baugruppe, da die Teile nicht zusammengefügt werden konnte, aus uns unbegreiflichen Gründen. Jedoch konnte diese wieder aufgehoben werden. Der nächste Schritt wird die Konstruktion der Hauptplatte und die Halterung des Servos darstellen.
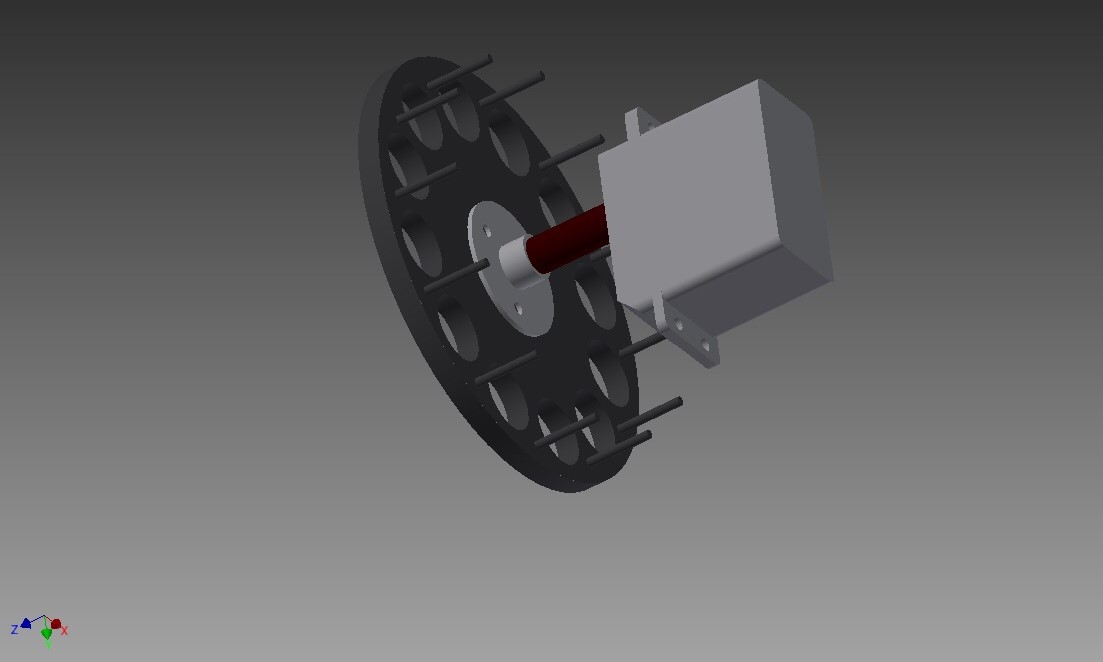
Ein kleiner Ausschnitt der Konstruktion im CAD.