WM Team
Im Bereich der Software wurde zu Beginn an einer automatischen Kalibration für die Liniensensoren gearbeitet. Leider konnten die Ideen nicht umgesetzt werden und es wurde deshalb entschieden, das Projekt nicht weiter zu verfolgen. Probleme machten fehlender Speicherplatz und abstürzende Microcontroller.
Zeitgleich wurden die Verwertung der Encoder Daten überprüft um sicherzustellen, dass die Werte in etwa stimmen. Zudem wurde ein kleiner alternativer Algorithmus geschrieben, um die Resultate noch zu verfeinern. Da dieser nicht funktionierte, vermutlich aufgrund der vielen sinus und cosinus Berechnungen, wird weiterhin der Alte verwendet.
Ein neu aufgenommenes Projekt war das Auslesen eines neuen Distanzsensors, eines LIDARs. Um diesen jedoch wie gewünscht zu nutzten wird ein Logic Level Converter benötigt und deshalb wurden die Tests mit einem Arduino durchgeführt. Nach einigen Schwierigkeiten funktionierte die Kommunikation einwandfrei.
Ein noch immer andauerndes Projekt ist die Überarbeitung der Fahrregelung. Dabei tauchte ein Bug auf, welcher den Roboter in seiner Richtung nicht nachvollziehbar korrigiert. An diesem Bug und der Vervollständigung der Regelung wird noch gearbeitet.
In der Mechanik wurden Verbesserungen am CAD und dem Dribbler vorgenommen. Als weiteres konnte das Lidar in das CAD eingebaut werden. Der Scanner des Lidars sollte auf einer Höhe von elf Zentimeter liegen. Dadurch können die Tore mit dem Lidar erkennt werden. Um die richtige Höhe zu erhalten, wurde ein passender Stand erstellt. Im CAD konnten nun die endgültigen Sensorabdeckungen eingefügt werden und der Motor des Dribblers wurde auf die andere Seite versetzt. dadurch gleicht er das Gewicht der Batterie aus und der Schwerpunkt verlagert sich gegen die Mitte. Für eine gleichmässige Fahrt ist es wichtig, dass der Schwerpunkt in der Mitte des Roboters liegt. Als letztes wurden Materialien für die Dribblerrolle getestet. Jedoch hat sich bis jetzt nur die alte Rolle bewährt. Sie wird aus einer Malerrolle hergestellt, die mit Latexmilch überzogen wird.
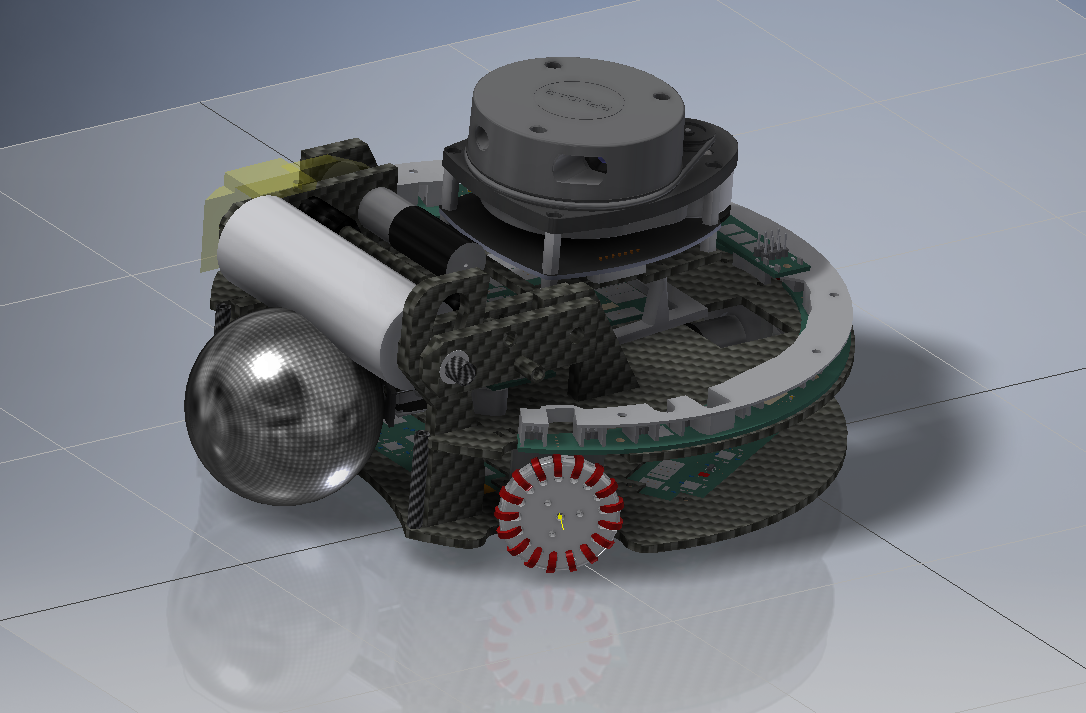
CAD Modell des Roboters
Die Elektronik hat in diesem Monat eine provisorische Stromversorgung für das neue Lidar sowie das Eagle für das neue Mainboard fertiggestellt. Für die Stromversorgung konnte ein stepup Converter genutzt werden, welcher ursprünglich für den Linearmotor des Kickers gedacht war. Für diesen Zweck hatte er sich allerdings als zu schwach herausgestellt. Für den Stromverbrauch des Lidar Motors scheint er sich aber zu eignen. Er regelt nun die fünf Volt der Powerboards auf 10 Volt hoch was für die praktischste und platzsparendste Lösung gehalten wurde. Das Eagle fertigzustellen war von elektronischer Sicht her nicht sonderlich kompliziert, da keine neuen Bauteile dazu kamen allerdings wurde es auf der Platine ziemlich eng und es mussten viele Bauteile verschoben werden. Schlussendlich konnte aber alles untergebracht werden und die Platine ist sogar noch kleiner als zuvor.
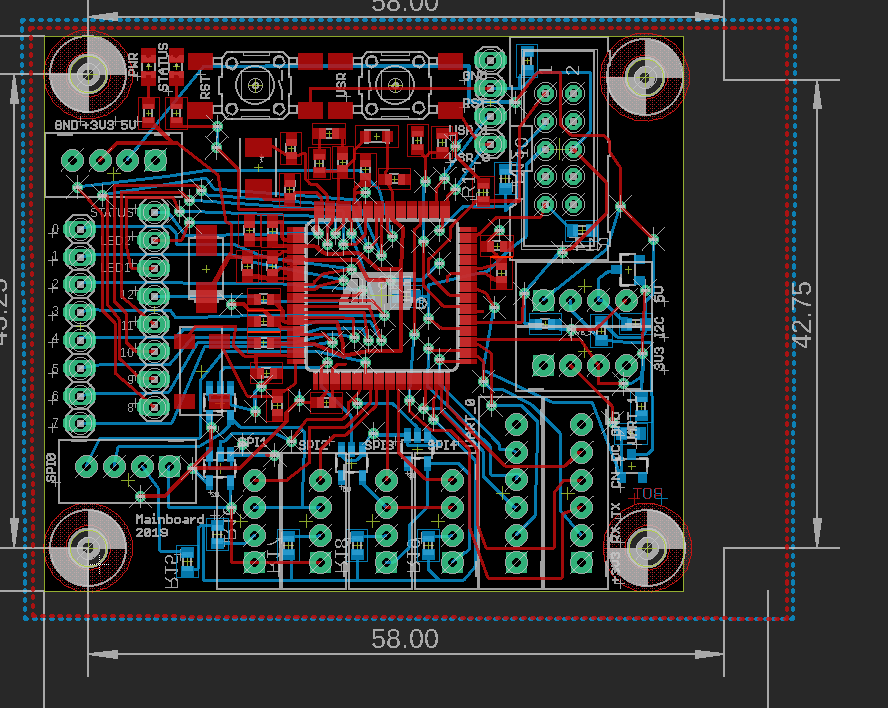
Das neue Mainboard