WM-Team
Im November stand bereits das erste Review an. Die meisten gesetzten Milestones konnten erreicht werden und anzugehende Probleme mit ehemaligen, erfahrenen Mitgliedern besprochen werden.
Verschiedene neue Ideen und auch die Testplattformen konnten bereits vorgeführt werden. Zudem wurde das neue Dribbler Konzept vorgestellt und der momentane Entwicklungsstand vorgeführt.
Die Milestones der Elektronik und Software waren hauptsächlich Basisarbeiten an bereits bestehenden Plattformen und Programmen und konnten entsprechend weniger demonstrativ gezeigt werden. Aber auch da fanden sich viele interessante Punkte für weitere Verbesserung und wie immer war das Feedback hilfreich und die neuen Inputs liessen neue Ideen aufkommen.


Nebst der Vorbereitung für das Review konnte softwaremässig mit der Auslesung der Lidar Daten auf einem Raspberry Pi Zero begonnen werden. Die Kommunikation funktionierte dank den Erfahrungen mit dem Arduino relativ schnell. Die Umrechnung dieser Daten in eine Position erweist sich als schwieriger als angenommen. Ein Performance Problem bei zu vielen Ausgaben des Programmes zog das Ganze zusätzlich in die Länge. Trotz den Problemen steht nun ein Grundgerüst welches weiter getestet und mit weiteren Funktionen ausgebaut werden kann.
Nebst der Arbeit am Lidar wurde die Arbeit an der Fahrregelung abgeschlossen. Die Umrechnung der Encoder Werte in x und y Bewegung funktioniert nun zuverlässig und zufriedenstellend genau. Auch ein relativ ruhiges und zielstrebiges Fahren ist nun garantiert.
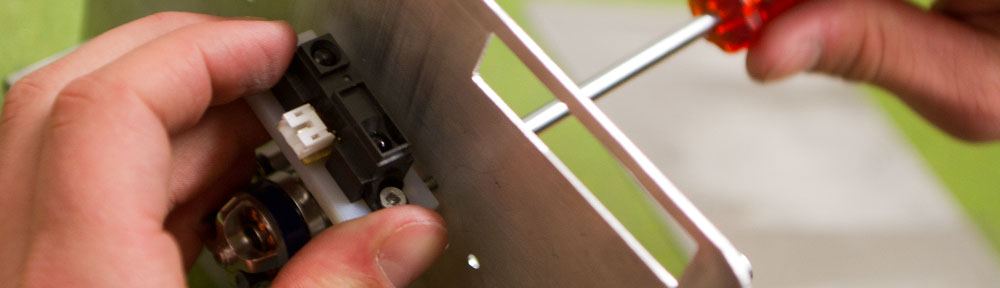
Die Elektronik begann das Testen der bestellten Lichtsensoren und stellte die 24V Stromversorgung des Linearmotors fertig. Die Tests der Lichtsensoren wurden mit Hilfe des Oszilloskops angestellt um herauszufinden wie es am einfachsten möglich sei, gleichbleibende Verhältnisse zu schaffen. Die Stromversorgung des Linearmotors war nach Erhalt der Teile schnell aufgebaut und testbereit. Allerdings ergab sich, dass durch die andauernde Umpolung der Spule des Linearmotors eine Spannungsschwankung auf der Stromversorgung entsteht. Dieses Problem konnte bis jetzt noch nicht behoben werden. Lösungsansätze sind Kondensatoren sowie Tiefpassfilter und Dioden um die Stromversorgung vor allfälligen falschen Stromflüssen zu sichern. Zudem wurden Überlegungen angestellt die gesamte Stromversorgung neu zu Planen da wir durch Regeländerungen dazu gezwungen sind einzelne elektronische Bauteile komplett abschalten zu können. Gleichzeitig muss aber die Stromversorgung für andere Bauteile gewährleistet werden.
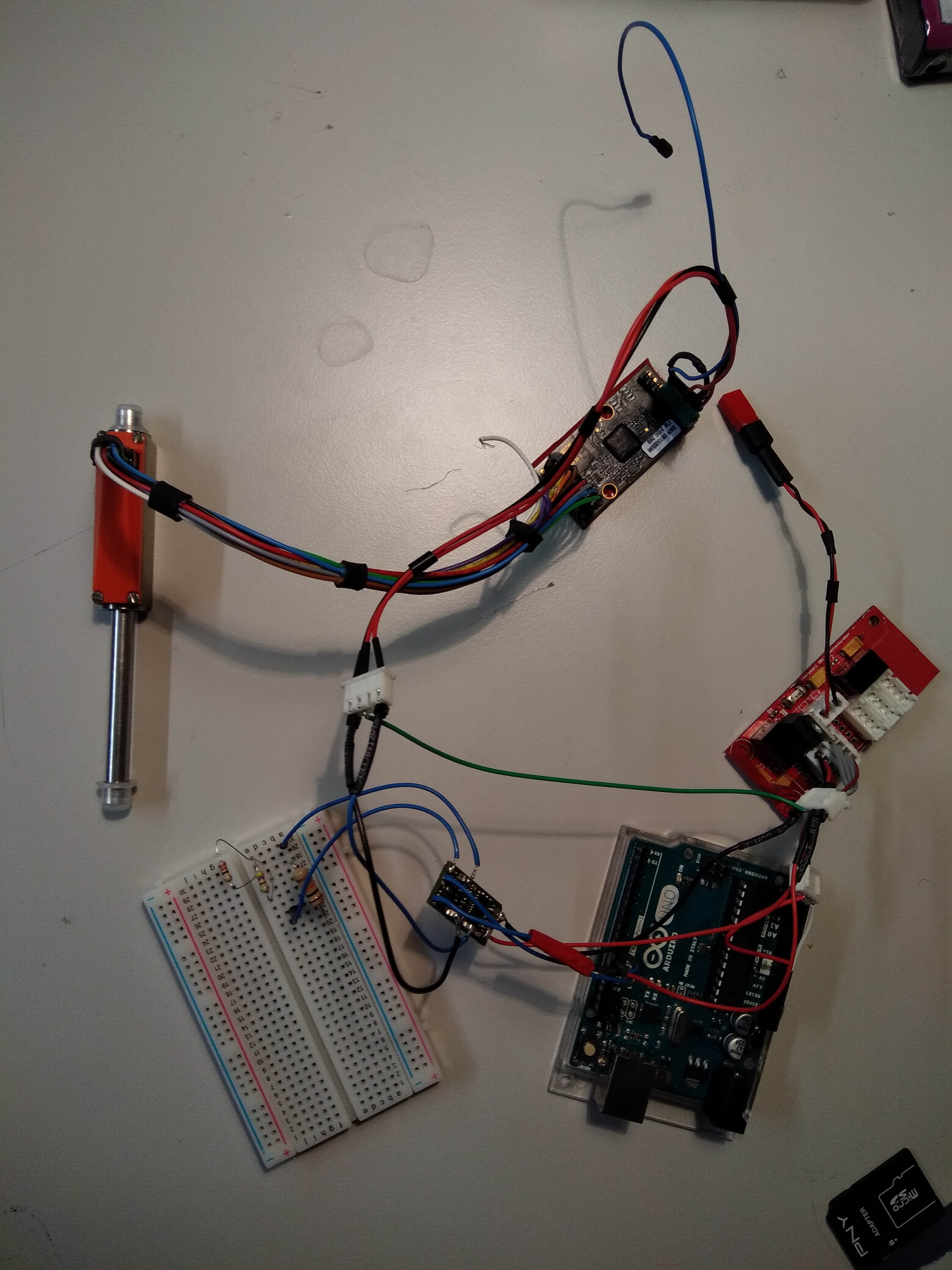
Die Testauslegung für den Kicker mit 24V
Die Mechanik testete weitere Dribblerrollen-Beläge. Auf verschiedenen Rollen wurde ein spezieller Haftbelag geklebt. Dieser Belag hat sehr kleine Gumminoppen. Diese Noppen verstärken die Haftung zwischen der Rolle und dem harten Ball aus Plastik. Dabei klebte man das Klebeband auf eine harte und einer weichen Rolle. Die zuvor genutzte Dribblerrolle, die mit Latex-Milch überzogen wurde, ist im Vergleich zu den neuen Rollen besser. Als weiteres wurde diesen Monat die neuen Teile des neuen Dribblers, für einen weiteren Testroboter, ausgedruckt. Bei dieser Plattform versetzte man das Master-Ballsensorboard, das zuvor direkt unter dem Dribbler befestigt wurde, auf die unterste Platte. Dies erlaubt es den Dribbler tiefer zu setzten und dadurch das Lidar in die Mitte zu nehmen. Nun muss getestet werden, ob diese Veränderung negative Auswirkungen hat. Als weiteres wurden die Zahnräder des Dribblers optimiert. Sie sind nun passgenauer und das grösste Zahnrad hält besser auf dem Schaft des Motors.
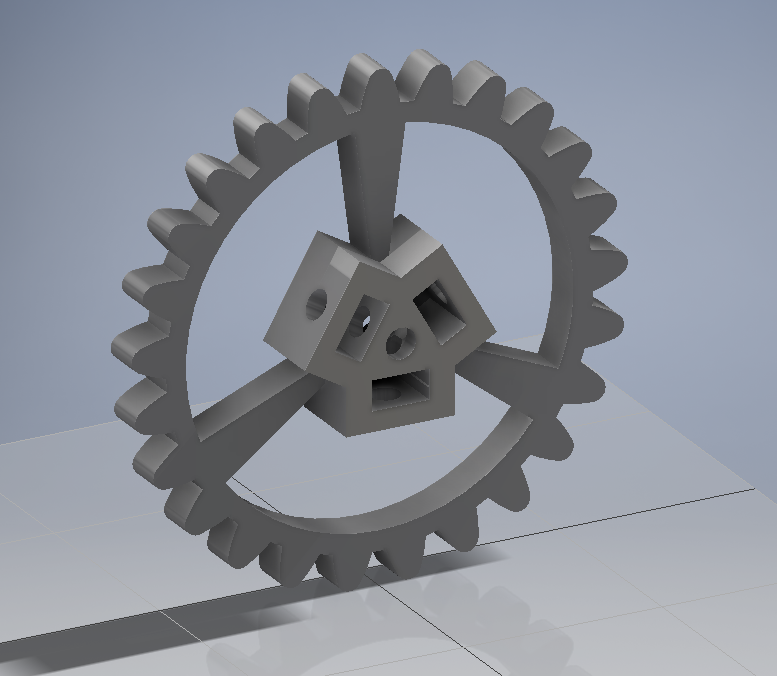
CAD Zeichnung des neuen Zahnrads