WM Team
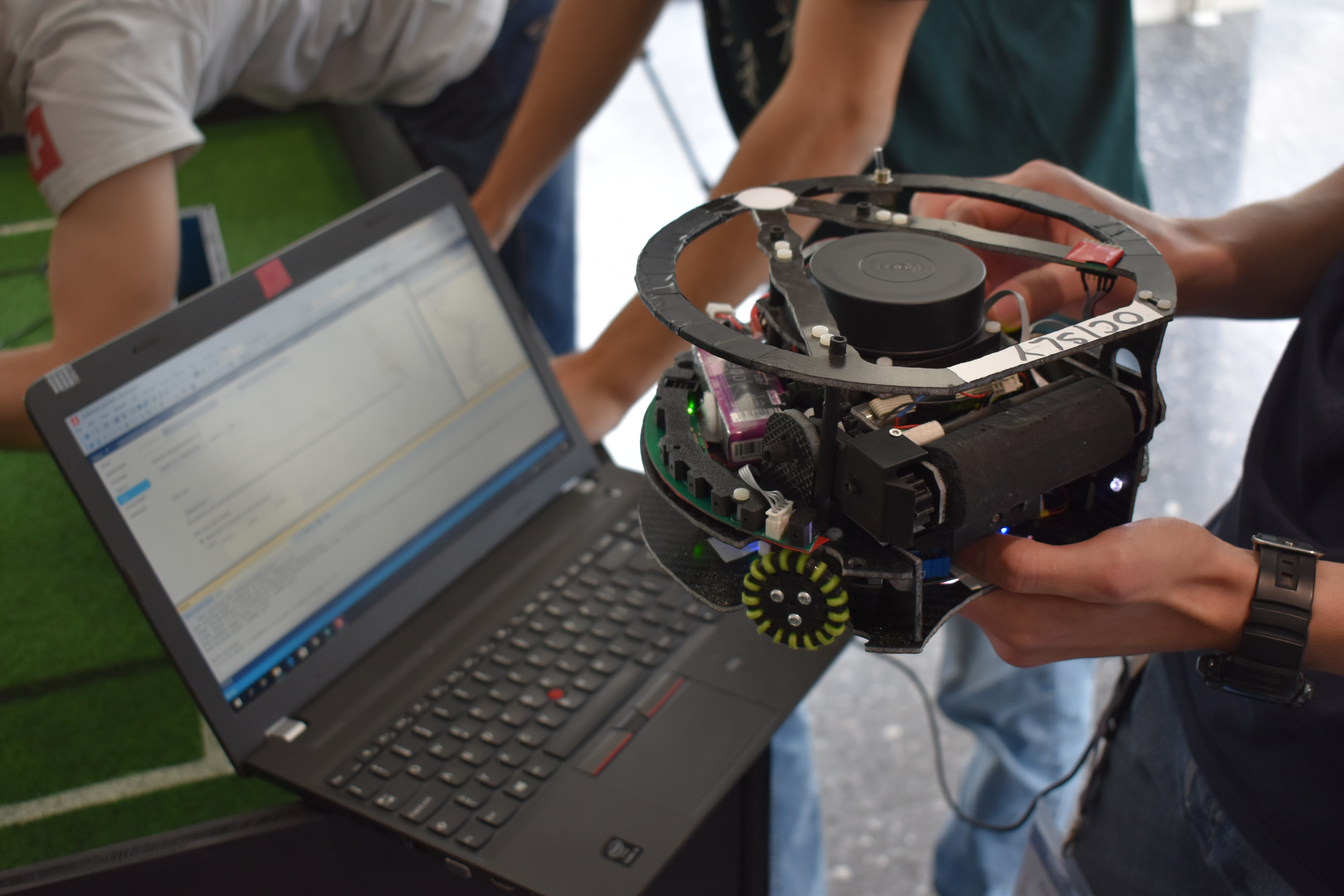
In diesem Monat baute die Mechanik einen Reifen, der auf der Höhe des Goals am Roboter befestigt wurde. Dieser hält den Roboter davon auf, in das Goal zu fahren. Es benötigte mehrere Versuche eine Befestigung für den Reifen zu machen, die genug stabil ist. Der Roboter fährt in einem Wettkampf teils mehrere Male mit hohen Geschwindigkeiten auf das Goal zu. Aus diesem Grund muss der Reifen gut befestigt sein. Damit der Reifen austauschbar ist, wurden Winkel ausgedruckt. Diese Winkel wurden an Carbonstäbe angeklebt und am Reifen mit Schrauben und Muttern angeschraubt. Als Weiteres wurden die Löcher für die Liniensensoren in die Bodenplatte eingezeichnet und neue 2.5 Millimeter dicke Plastikschrauben gekauft.

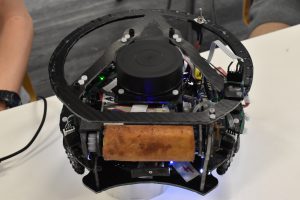
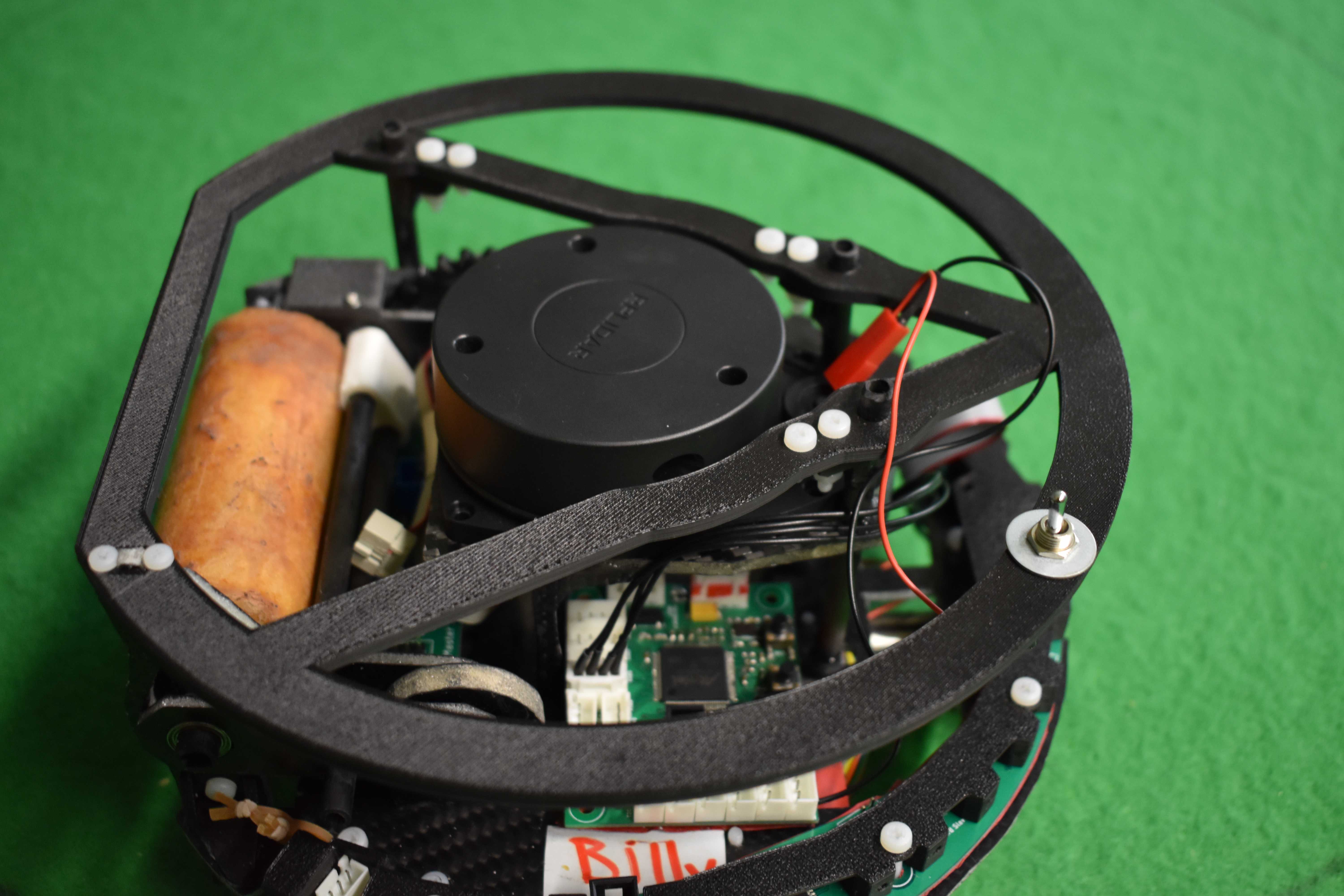
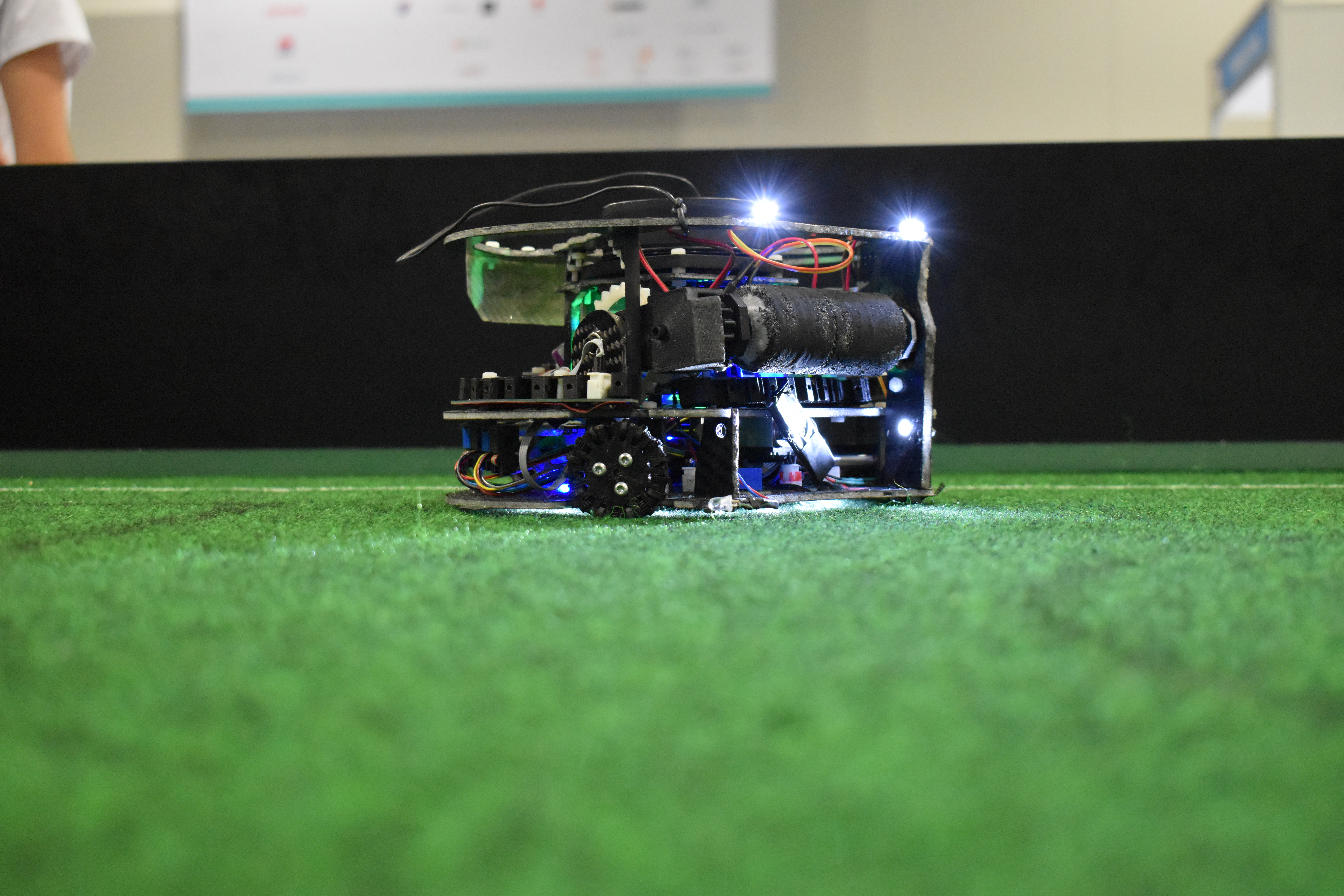
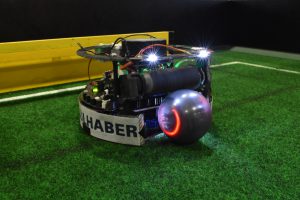
Der Roboter in neuem Look
Die Elektronik bestellte Boards sowie verschiedenes Werkzeug um effizienter arbeiten zu können. Des Weiteren wurden neue Linesensorboards bestellt und funktionstüchtig bestückt. Diese wurden auch schon getestet. Es sollte mit ihnen sehr einfach möglich sein die Linien zu erkennen. Unter Anderem da sie auch über grössere Distanzen als 2mm noch zuverlässig funktionieren. Mit den bestellten Teilen wurden einige der neuen Mainboards funktionstüchtig bestückt. Des Weiteren wurde ein Kabel konstruiert um die untere Platine des LIDARs zu ersetzen, so kann weiteres Gewicht eingespart werden und der Zugang zum Mainboard auf dem Roboter wird erleichtert. Durch zusätzliche Bestellungen in diesem Monat wird es auch möglich sein die gesamte Elektronik für den zweiten Bot fertigzustellen. Im folgenden Monat werden nun noch neue Powerboards sowie andere Platinen bestellt um den Bestand aufzufüllen. Zusätzlich wird ein kompletter Satz Elektronik für den zweiten Bot gebaut werden sowie möglichst viele Ersatzteile. Ausserdem werden die Kabel auf den Robotern auf das Minimum reduziert um weiteres Gewicht zu sparen.
Aufgrund der Schwierigkeiten mit der Kommunikation zwischen Raspberry Pi und dem Mainboard, wurde entschlossen das Rasperry zugunsten von einem Esp32 auszuwechseln. Dieser Wechsel verlief ohne grosse Probleme weshalb es nun bereits möglich ist die auf dem Esp errechnete Position an das Mainboard zu senden. Zusätzlich ermöglicht dies nun, dass die Drehung des Roboters an den Esp gesendet werden kann. Damit kann nun unabhängig von der Orientierung des Roboters seine Position berechnet werden. Auch wurden kleinere Bugs bei der Settingsboard Auslese behoben. Mit den neuen Liniensensoren bestückt konnte zusätzlich damit begonnen werden, das Programm für diese umzuschreiben.
Rescue Maze
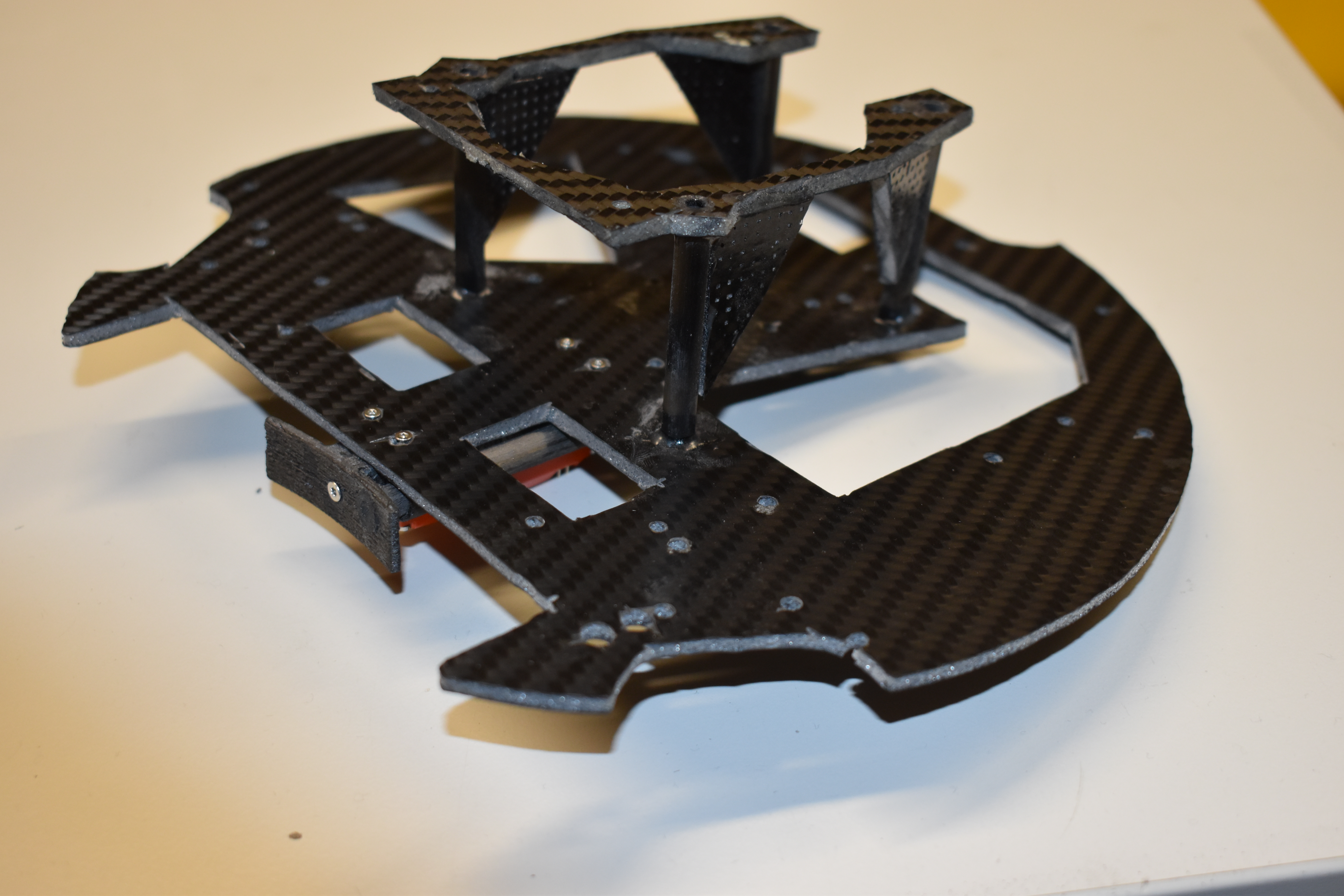
Im März war es wichtig, dass die Mechanik einen Prototyp-Roboter hergestellte, mit dem der Rest der Gruppe arbeiten kann. Zuerst wurden alle wichtigen Bestandteile der Mechanik übergeben, sodass sie diese in den Roboter einbauen konnte. Als dann auch die 3D-ausgedruckten Räder geliefert wurden, ging das zusammenschrauben der schon ausgeschnittenen Teile schnell. Noch hatte die Mechanik das Ziel, den Prototypen so zu bauen, dass er noch gut anpassbar war. So ist nun das Grundgestell vom Maze Roboter vorhanden, doch es wird noch daran gearbeitet. Komplikationen gibt es mit der richtigen Auswahl der Elektromotoren. Auch wurde beim Bauen viel mit Werkzeug improvisiert, weil die Mechanik noch nicht völlig vertraut mit der Physikwerkstatt ist.

Der März war für die Elektronik ein äusserst produktiver Monat. Durch harte Arbeit und mit etwas Hilfe konnte sie fast alle Dinge fertigstellen. Anfangs tauchte das Problem auf, dass die Ansteuerung des Motorboards nicht funktionierte. Es stellte sich heraus, dass es ein Teil gibt, was dieses Problem löst. Die Elektronik hat dieses Bauteil benutzt. So gelang es, dass der Roboter geradeaus fahren kann. Bis zum Wettbewerb muss die Elektronik nur noch einige Lämpchen löten. Diese werden als Leuchtpakete abgeworfen. Die Elektronik ist zuversichtlich, dass sie es schafft alles bis zum Wettbewerb zu erledigen und funktionierende Elektronik abzuliefern.
Die Software konnte diesen Monat die Ansteuerung der I2C Wärmesensoren fertigstellen, sowie die Adresse der Sensoren ändern. Ausserdem wurden die Infrarot Distanzsensoren getestet. Beide Sensorsysteme funktionieren einwandfrei. Die meiste Zeit wurde jedoch damit verbracht die Kommunikation zwischen Arduino und unseren Motorboards zu gewährleisten. Mit dem Motorboard von unsrem WM-Team haben wir den Vorteil, dass die Encoder der Motoren ausgelesen werden können, was mit Arduino Motorboards alleine nicht möglich wäre aufgrund zu geringer Rechenleistung. Jedoch sind die Motorboards des WM-Teams komplexer aufgebaut, da sie auch intelligenter sind. Damit hatten wir einige Probleme sie konnten jedoch zusammen mit der Elektronik gelöst werden.
Rescue Line
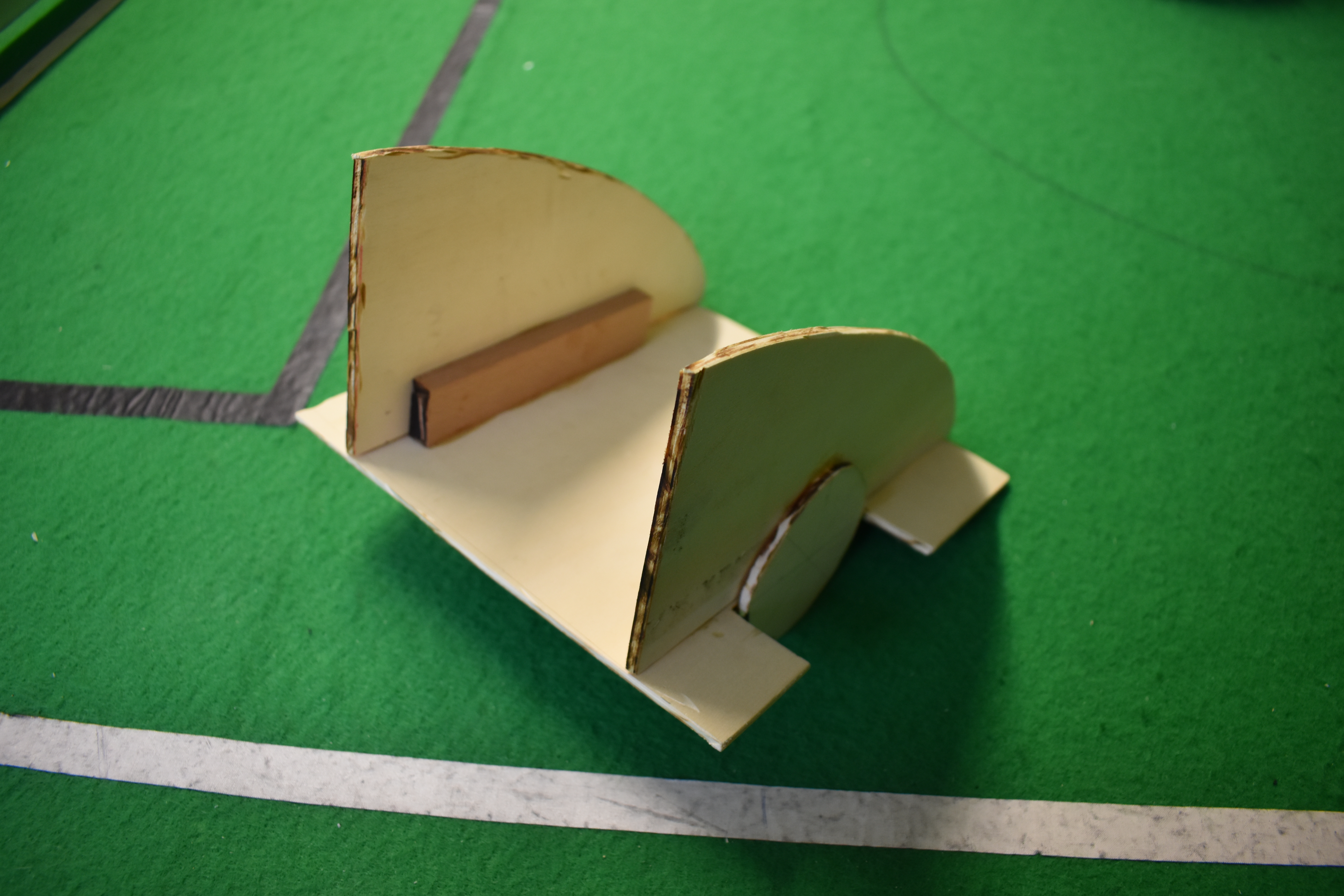
Das 3D Modell des Roboters wurde diesen Monat gezeichnet. Als Material der Platten wurde Holz (in Form von 4mm Platten) gewählt. Als Klebestoff wurde zuverlässiger UHU 2-Komponentenkleber ausgesucht, welcher hauptsächlich durch seine Stabilität und Transparenz überzeug. Alle Platten und Teile wurden bereits mit dem Dremel aus dem Holz ausgefräst und danach wurden die Kanten mit
Schleifpapier der Stärke 300 behandelt. Die Seitenplatten wurden an der Bodenplatte angebracht und im nächsten Klebeschritt wird die Motorhalterung an der Bodenplatte angebracht, an welcher auch der Sensor 2mm über dem Boden befestigt wird.

In diesem Monat gab es einige herbe Rückschläge. Da das bis da jetzt genutzte Motorboard irreparabel kaputt ging, musste Ersatz geschafft werden. Dabei stellte sich heraus, dass alle anderen Motorenboards, die dem Team zur Verfügung stehen ebenfalls funktionsuntüchtig sind. Um Aushilfe zu schaffen, wurde uns vom WM-Team aus einem ihrer Roboter ein funktionsfähiges Motorenboard geliehen, um nun weiter zu testen. Ausserdem wurde das SPI-Verteilsystem verändert, sodass die bisherigen JST-4 Stecker verwendet werden können. Weiter wurden neue elektronische Bauteile bestellt, um Powerboards herzustellen, die auch eher rar sind. Da noch kein Programm zur Steuerung von Motorboard und Linesensorboard geschrieben wurde, konnten noch keine Tests zur Funktionsfähigkeit dessen durchgeführt werden, was noch nachzuholen ist.

 Die Chance auch „die Grossen“, also Major League, Spiele zu sehen sorgte natürlich auch ein wenig für Inspiration und das Verlangen, genauso coole Roboter zu bauen.
Die Chance auch „die Grossen“, also Major League, Spiele zu sehen sorgte natürlich auch ein wenig für Inspiration und das Verlangen, genauso coole Roboter zu bauen.