WM-Team
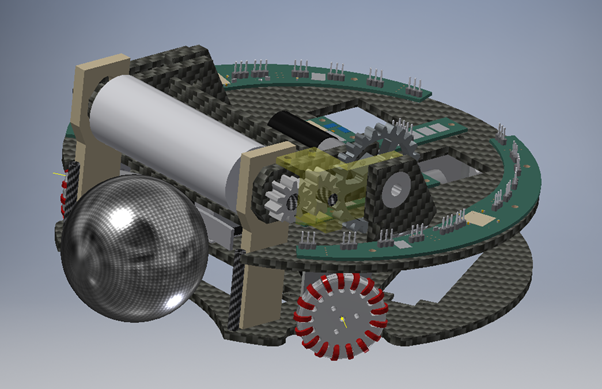
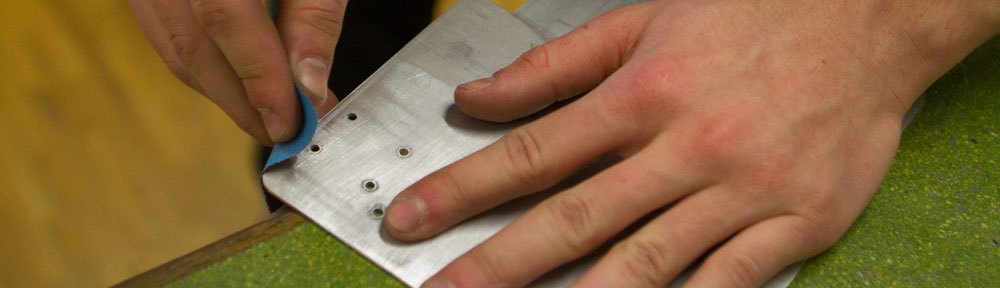
Die Mechanik konnte in diesem Monat einen weiteren Dribblerrollenbelag testen und die Carbonplatten für den Roboter ausfräsen. Der Belag für den Dribbler besteht aus einem Antirutsch-Klebeband für Treppen. Auf einer Malerrolle aufgeklebt, bietet er eine gute Haftung. Unglücklicherweise zerstört die raue Oberfläche jedoch die verwendeten Plastik Bälle. Entsprechend kann diese Variante leider nicht eingesetzt werden und die Suche nach Verbesserungsmöglichkeiten geht weiter. Die Platten des Roboters wurden aus 3mm und 4mm Carbon-Sandwichplatten hergestellt. Die 4mm Platten werden verwendet, wenn seitlich Schrauben eingeschraubt werden. So wird sichergestellt, dass die Schraube im Hartschaum zwischen den Carbonschichten halten. Für die Gewinde werden die Löcher mit Epoxid Harz gefüllt. Weiter wurde eine neue und leichtere Lidarhalterung aus Carbon gebaut.
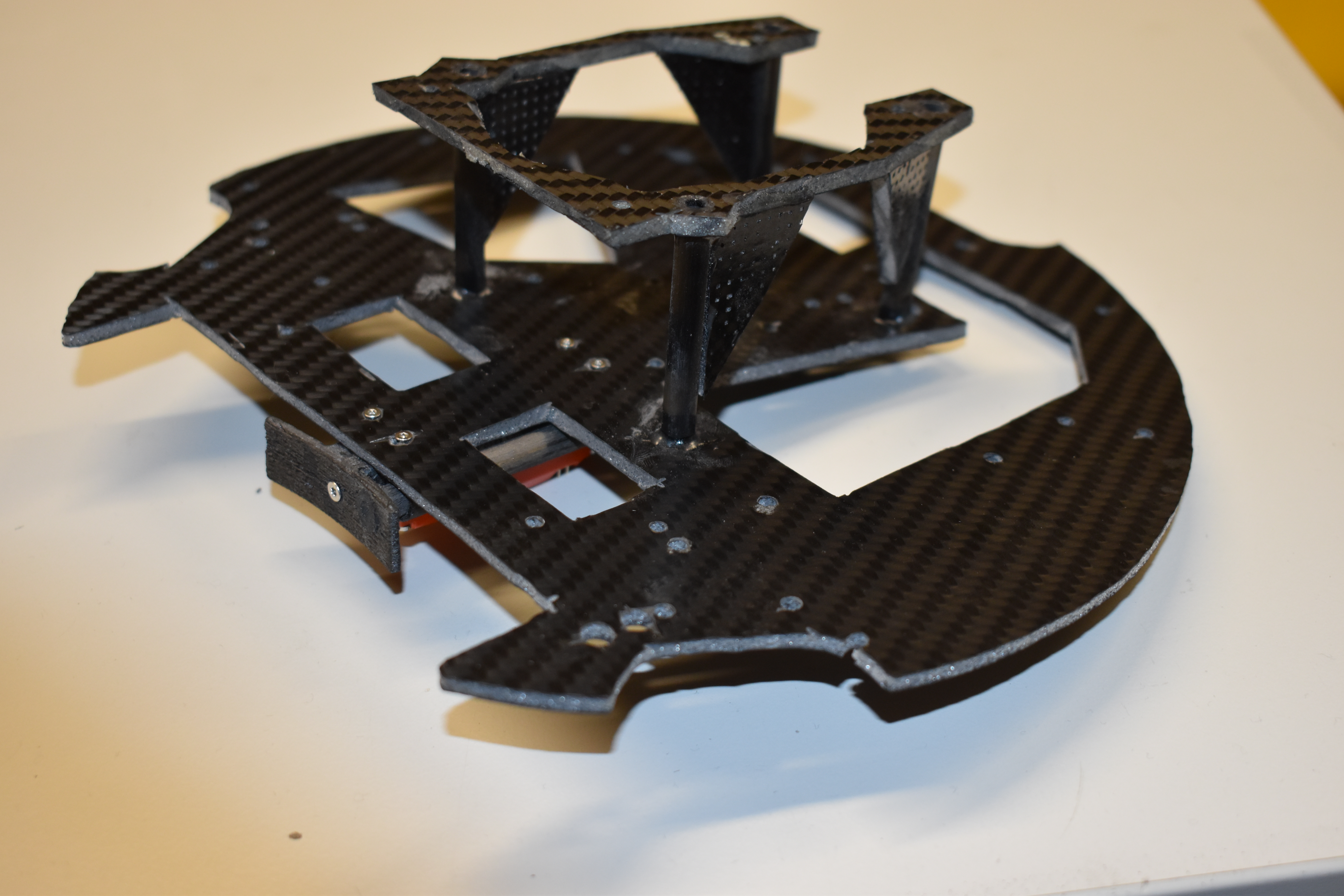
Die ersten Carbon Teile für die neuen Roboter
Bei der Elektronik des WM Teams wurde diesen Monat die untere Platine des Lidars untersucht und ein Teil der Platine der neuen Liniensensoren gezeichnet. Zudem wurden Bauteile zur Platinen Bestückung sowie Infrarot-Sensoren für die Ballsensoren bestellt. Die Lidar-Platine wurde nach längerem analysieren für unsere Zwecke als überflüssig befunden. Dadurch lösen sich die aufgekommenen Gewichtsprobleme beinahe gänzlich. In der Kategorie Soccer Light Weight dürfen die Roboter nicht mehr als 1.1kg wiegen. Dies ist eine Herausforderung mit allen verwendeten Bauteilen und eine erste Abschätzung zeigte, dass wir eher zu schwer sind. Bei der Planung der neuen Liniensensoren musste, aufgrund der speziellen Platinenform, auf ein neues Programm, Autodesk Fusion, ausgewichen werden. Somit hat man gelernt wie die Autodesk Cloud funktioniert und wie man Eagle und Fusion Dateien korrekt verlinkt und bearbeitet. Dies vereinfachte den Arbeitsablauf ungemein. So sollte es möglich sein alle Sensoren regelmässig und korrekt kreisförmig anzuordnen und zudem die Platinenform möglichst passend zu designen.
In der Software ging es mit dem der Programmierung des Raspis weiter. Die UART Kommunikation zwischen Lidar und Raspi funktioniert zuverlässig. Entsprechend stand das Umsetzen eines geeigneten Algorithmus für die genaue Positionsbestimmung an. Nach verschiedenen Versuchen konnte dies auf ein stabiles Grundlevel gebracht werden. Weitere Verbesserungen sind noch erwartet und von Nöten, jedoch funktioniert eine noch leicht wacklige Postionsfindung nun beständig.
Ebenfalls für die Position wichtig sind die Encoder Daten der Motoren. Über jene lässt sich bestimmen, wie sich der Roboter bewegt hat, beziehungsweise wie sich die Räder drehten. Um die Daten besser nutzbar zu machen wurde der Algorithmus überarbeitet. Neu wird für jedes Rad ein Vektor bestimmt, welche zusammen die Gesamtverschiebung des Roboters ergeben. Die Variante scheint zuverlässig zu funktionieren und verbessert die Genauigkeit der erhaltenen Werte.
Junior-Teams
Auch die beiden Junior Teams konnten im Dezember starten. Nachdem alle neuen Mitglieder in die diversen Bereiche eingeführt wurden und die Teams für die beiden Disziplinen gebildet waren, standen bei beiden Teams Planungstreffen für die Roboter und Zeitpläne an.
Beide Teams werden als Mainboard mit einem Arduino arbeiten und die alten Motorboards des WM-Teams für die Motoransteuerung benutzen.
Für das in der Kategorie Maze teilnehmende Team kommen zudem neu per I2C auswertbare Wärmesensoren hinzu. Diese dienen der Lokalisierung der zu rettenden Personen im Spielfeld.