Das aktuelle Team darf sich ab Morgen (7. Juni 2023) in Varaždin (Kroatien) in den Kategorien Rescue Line und Rescue CoSpace beim Wettbewerb RoboCup Junior mit den Besten aus Europa messen.
Gemäss offizieller Webseite (https://rcjcroatia2023.eu/contact) nehmen neben der Schweiz 18 weitere Nationen an der diesjährigen Europameisterschaft teil.
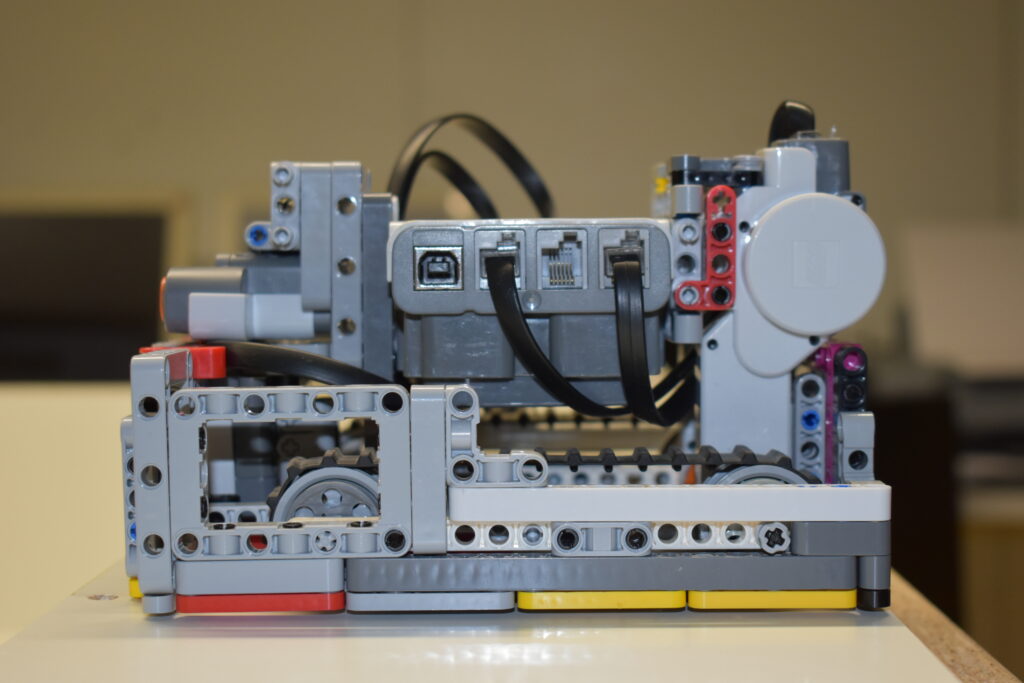
Für das Team waren die letzten Monate sehr lernintensiv. So wurde von der LEGO-Mindstorm-Plattform auf einen selbst gebauten Roboter aus gedruckten Teilen (mittels 3-D Drucker: Prusa i3 MK3S+) und auf die Arduino-Plattform gewechselt.
Das Team ist bereits heute in Kroatien angekommen und freut sich auf den ersten überregionalen Wettbewerb.
Der Vorstand dankt speziell Stefan Lippuner für die Übernahme des Mentorings an diesem Anlass und ist ebenso glücklich, dass nach den schwierigen Jahren wieder ein hoch motiviertes Team Helveticrobot an internationalen Wettbewerben vertritt.
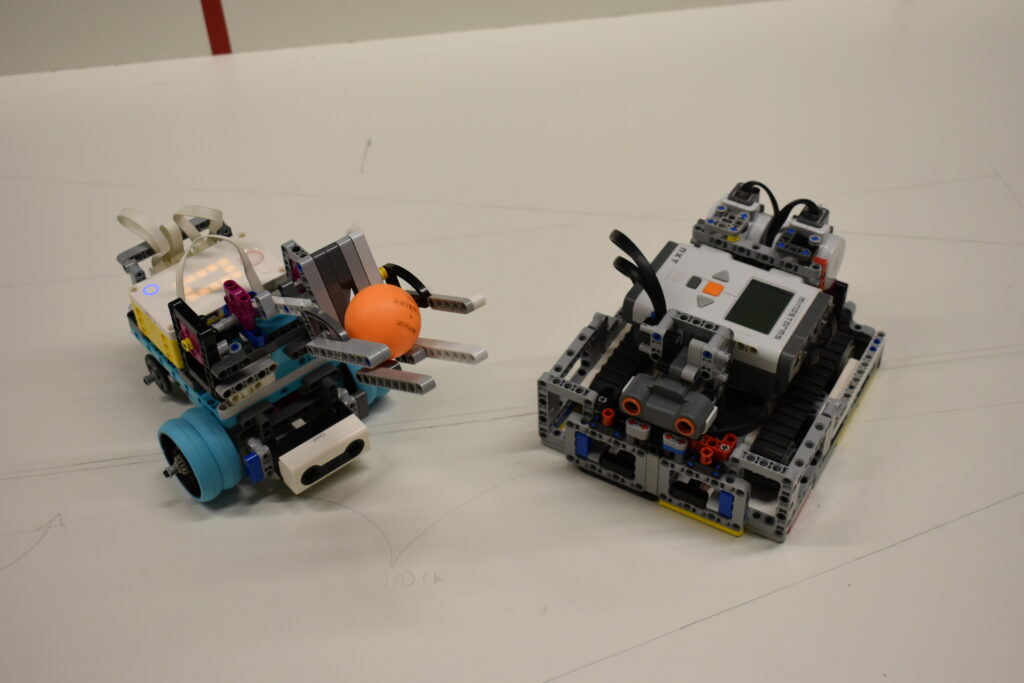
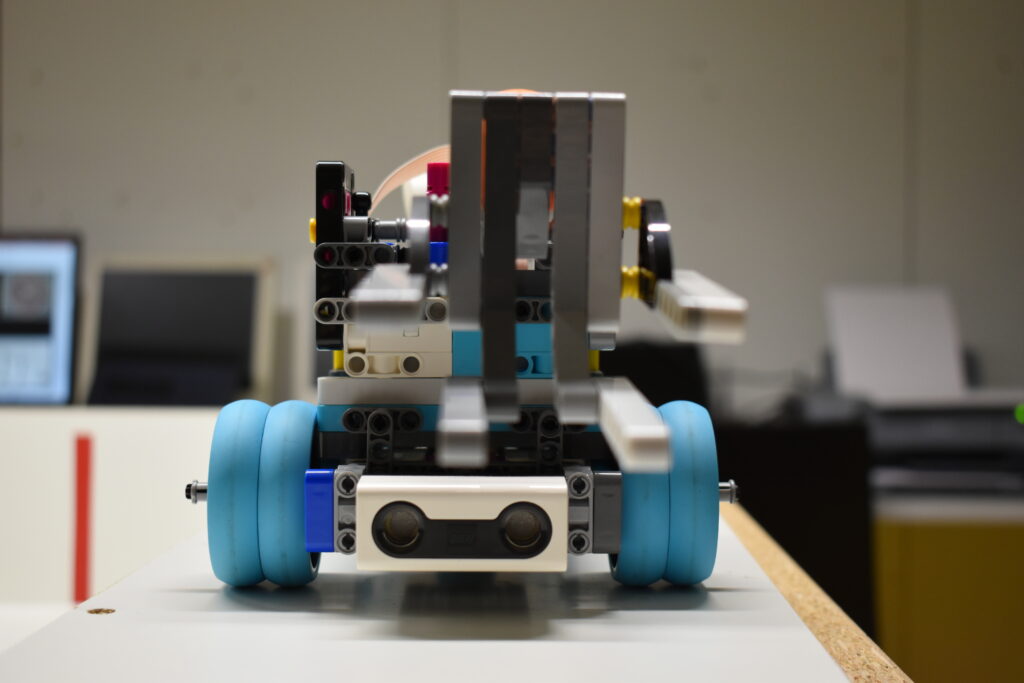
Am Samstag, 19.11 nahmen wir an den Robolympics an der OST – Ostschweizer Fachhochschule am Campus Rapperswil teil. Das Team Helveticrobot haben Angelo, Damiano und Elia vertreten.
An den Robolympics kann man in bis zu sechs verschiedenen Disziplinen antreten. Da sich das neue Team erst gerade gebildet hat, haben wir uns entschieden, an den Disziplinen MiniSumo und RoboBall teilzunehmen.
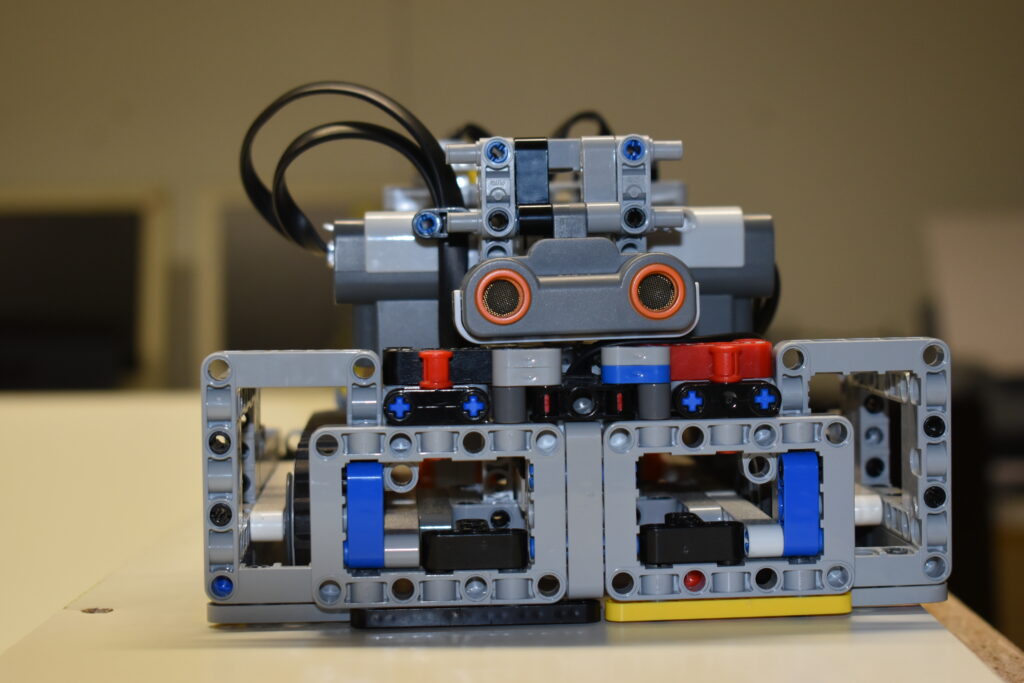
Bei MiniSumo geht es darum, den gegnerischen Roboter von der Spielfläche zu drängen, wie beim klassischen Sumo Ringen. Das maximale Gewicht der antretenden Roboter ist dabei vorgegeben.
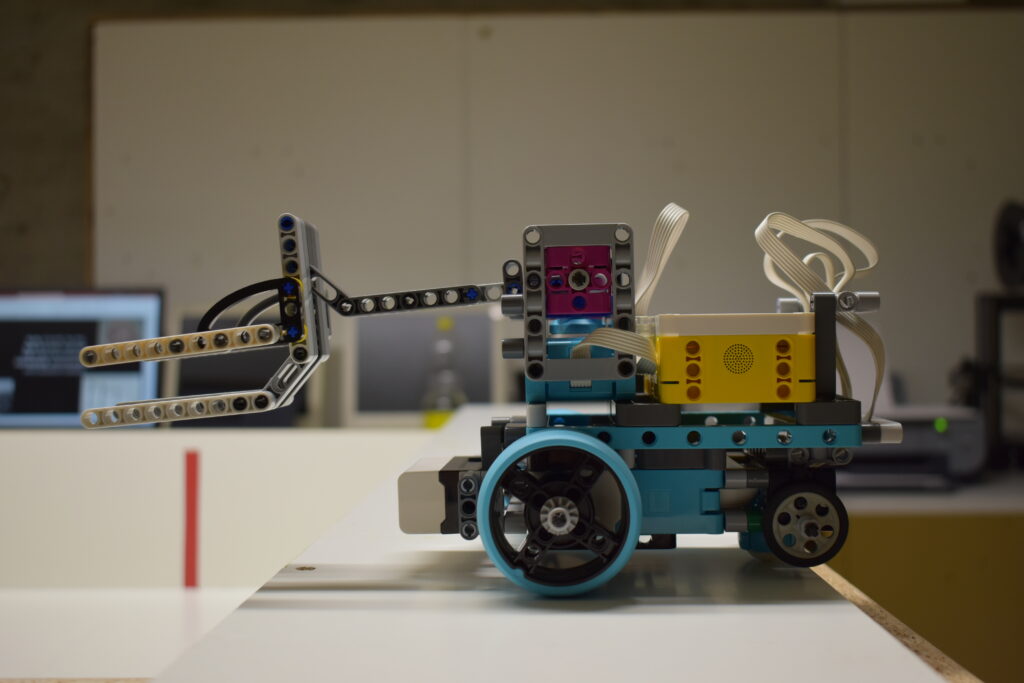
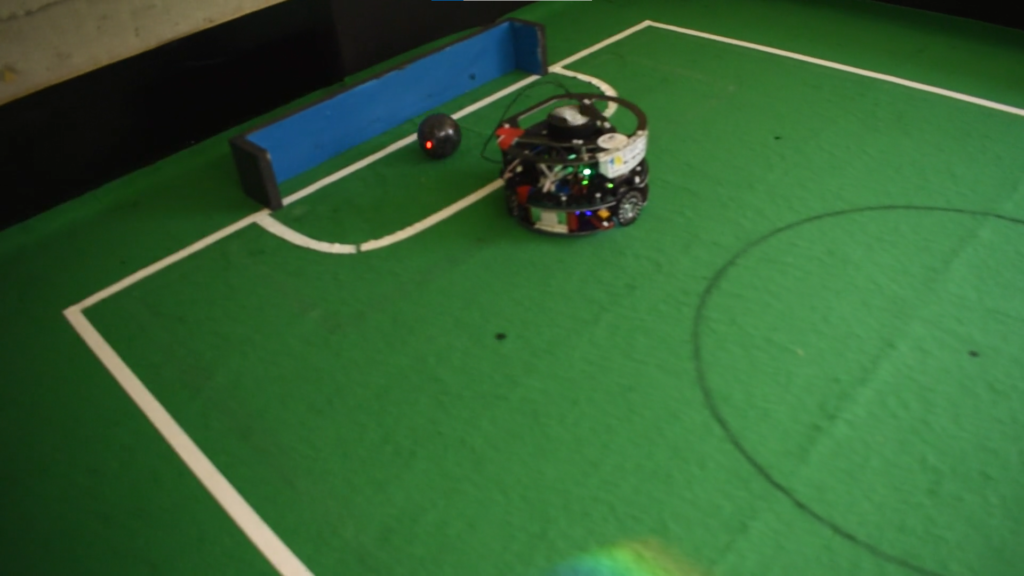
Das Ziel bei RoboBall ist es, so viele Punkte wie möglich mittels der Beförderung von Bällen in die drei Tore zu erreichen. Zu beachten gilt, dass nicht alle Treffer gleich gewertet werden. Es gilt sich eine gute Strategie zu überlegen und den Roboter entsprechend zu programmieren.
Somit war nicht der Gesamtsieg über alle sechs Disziplinen das Ziel, sondern die Fokussierung auf die zwei ausgewählten Disziplinen und möglichst viel Erfahrungen an diesem Wettbewerbstag für spätere Turniere zu gewinnen. Und diese Aufgabe kann als geglückt angeschaut werden. Mit vereinten Kräften musste zum einen der Sumo-Roboter in kurzer Zeit umgebaut werden, da wir die Regeln falsch interpretiert hatten und der Roboter am Anfang zu gross und somit regelwidrig war.
Zum anderen verhielt sich die programmierte Drehung beim RoboBall-Roboter auf dem Turnierspielfeld anders als in der Kantonsschule in Chur. Deshalb wurde auch dieser Roboter während des Tages mehrmals umgebaut um bessere Resultate zu erzielen.
Unser Wettbewerbstisch nach der heissen Phase des Roboterumbaus.
Am Ende konnten wir mit zwei grossen Erfolgen den Tag abschliessen. Wir erzielten den ersten Platz in der Disziplin RoboBall und den zweiten Platz in der Disziplin MiniSumo.
Somit konnten wir auch in der Gesamtwertung einen Achtungserfolg erzielen, indem wir mit der Teilnahme in nur zwei von fünf gewerteten Disziplinen unter den 20 Teilnehmenden Teams am Schluss auf Platz 10 landeten.
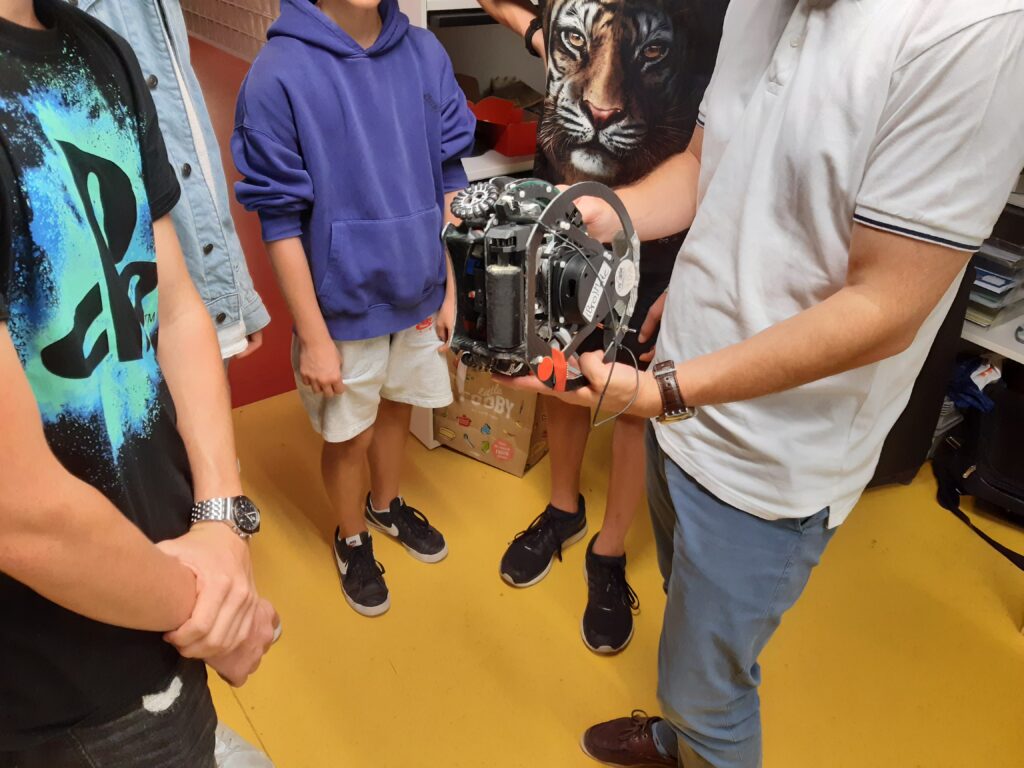
Erster Platz bei RoboBall (in der Mitte von links nach rechts: Damiano, Elia und Angelo).
Im Oktober dürfen wir nun nach rund zwei Jahren mit weniger Aktivität neue Mitglieder begrüssen. Es sind dies Angelo, Brandyn, Damiano und Elia.
Zunächst wird das Team in mindestens einer Disziplin an den Robolympics im November in Rapperswil antreten. Danach sollen im Winter die Grundlagen von selbst konstruierten Robotern erarbeitet werden. Natürlich werden wir irgendwann dazwischen das neue Team auch noch im Detail vorstellen.
Die diesjährige RoboCupJunior Soccer Championship (WM) fand virtuell vom 22.6.2021 bis am 28.6.2021 statt. Unser WM-Team nahm in Kategorie Soccer Lightweight teil. In dieser Kategorie ging es darum individuelle Challenges und eine SuperTeam Challenge (Zusammen mit anderen Teams) zu lösen. Diese Challenges musste man jeweils physisch, also mit echten Robotern lösen, die Lösung filmen und das Video einschicken.
Nach den Challenges musste man jeweils noch an einem Interview teilnehmen, in welchem man Erklärungen zur gewählten Lösung geben konnte. Diese Interviews fanden im virtuellen Raum Gather.Town statt. Gather.Town ist eine Plattform, bei der es einen videospielähnlichen Raum gibt, in dem man sich mit einem Avatar bewegen kann und mit anderen Leuten per Videoanruf kommunizieren kann.
Gather.Town
Dummerweise mussten wir dieses Jahr während der Veranstaltung trotzdem zur Schule. Demnach hatten wir jeweils sehr wenig Zeit, um die Challenges zu lösen.
Die erste Challenge war es auf einem Fussballfeld für Roboter möglichst viele Goals in einer Minute zu schiessen. Voller Motivation haben wir daran zu arbeiten begonnen. Der Roboter hatte allerdings ein Problem mit der Orientierung auf dem Feld, das auf den Code zurückzuführen war. Das Softwareteam arbeitete daran bis spät in die Nacht hinein, konnte das Problem aber nicht ganz beheben. Schlussendlich erreichten wir in dieser Challenge den 12. Rang.
Für die SuperTeam-Challenge haben wir zuerst die anderen Teams kontaktiert und haben uns die Aufgaben aufgeteilt. An unserer Aufgabe haben wir hart gearbeitet, konnten sie aber aus Zeitgründen nicht ganz fertigstellen.
Trotz der knappen Zeit neben der Schule war die WM für uns eine wertvolle Erfahrung. Wir lernten über Gather.Town Gleichgesinnte kennen und konnten uns mit ihnen über Robotik unterhalten. Zudem war es für viele von uns der erste internationale Robotikwettbewerb. Schliesslich lernten wir auch besser unter Zeitdruck zu programmieren oder sonstige Arbeiten zu verrichten.
In diesem Monat hat die Mechanik viel am Roboter gebaut. Anfang Monat hat sie die Verbindungen, von denen letzten Monat die Rede war, getestet und verbessert. Im Detail wurden die Verbindungen etwas dicker und somit stabiler gemacht und die Schraubenlöcher wurden besser an die Schrauben angepasst. Nun hat sie von diesen Verbindungen nochmals ein paar drucken lassen, um mit dem Bau des Roboters zu beginnen. Zudem hat die Mechanik gelernt, wie man Gewinde in Carbonsandwhichplatten macht.
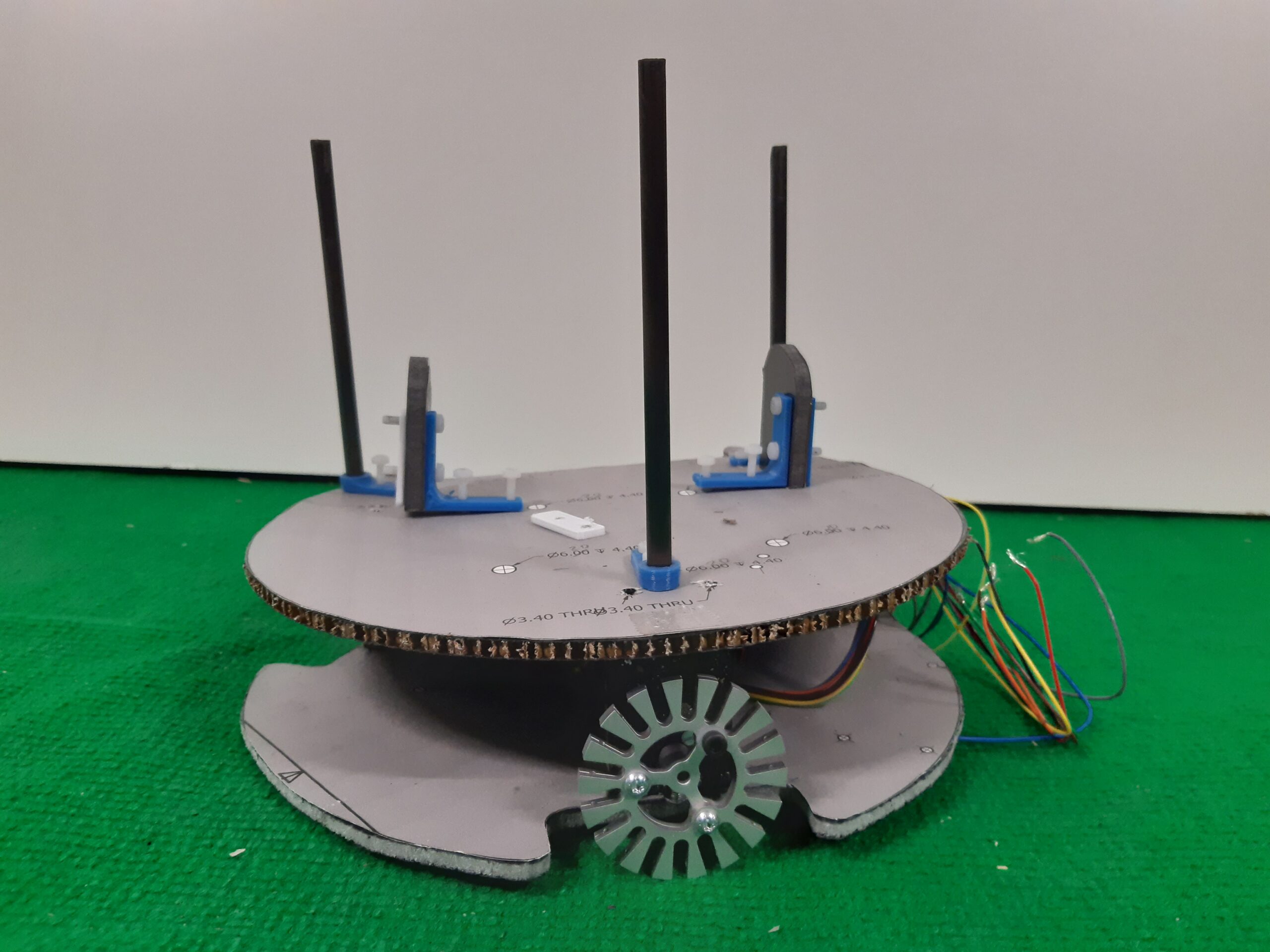
Mit diesem Wissen und Material hat sie sich an das Zusammenbauen des Robos gemacht. Mittlerweile sind die Bodenplatte mit Motoren und Omniwheels, die Mittelplatte mit Dribbelhalterung und das Dach montiert. Die Schwierigkeit lag darin, die Löcher für die Schrauben oder Carbonstäbe präzise genug zu Bohren. Oftmals musste die Mechanik dann die Löcher nochmals neu bohren. Mit der Zeit hat die Mechanik ein System gefunden wie man die Löcher präziser Bohren kann.
Roboter wird zusammengebaut
Elektronik
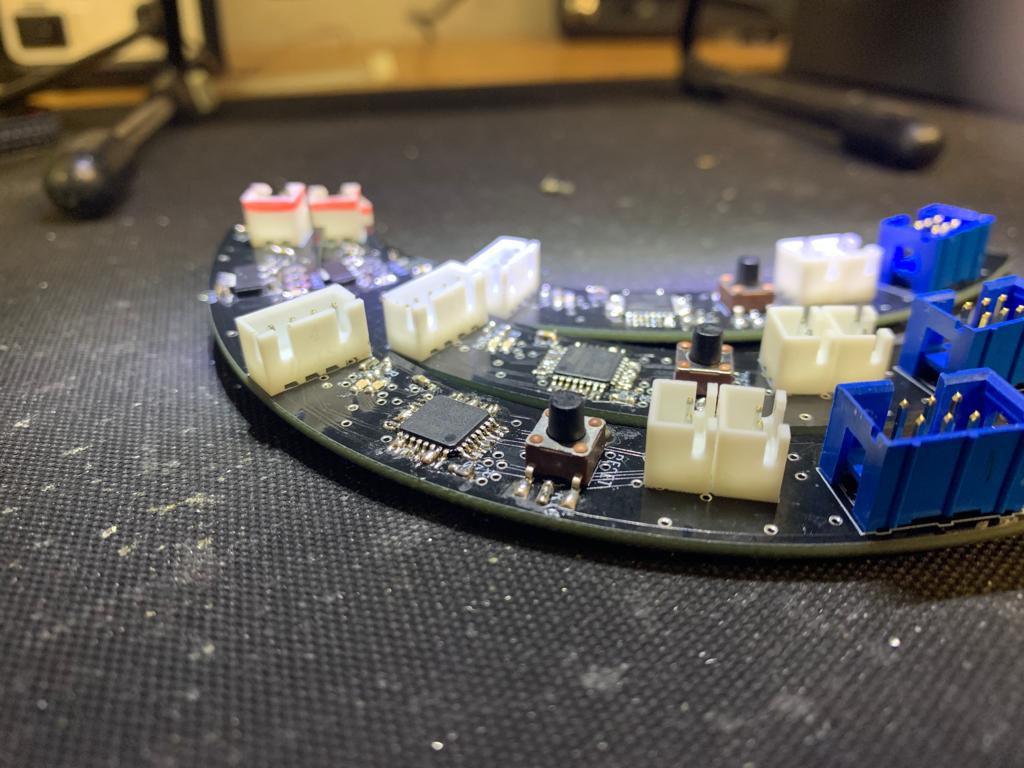
Die Elektronik hat sich im Mai mit den Ballsensorplatinen beschäftigt. Die Ballsensorplatinen sind für die Ballerkennung und Ballortung zuständig. Die Elektronik hat sich mit eben diesen einzelnen Teilen auf den Platinen, welche auf die Platinen gelötet werden, beschäftigt.
Software
Im Monat Mai hat das Softwareteam an den Liniensensoren gearbeitet. Dies ist Momentan ein sehr Zentrales und nicht so einfaches Problem. Denn die Sensoren an sich funktionieren doch das Programm noch nicht so wirklich oder nur unter besonderen Umständen. Wir sind daran herauszufinden warum dies so ist. Ausserdem haben wir uns noch kurz mit dem PDI Regler beschäftigt. Im nächsten Monat werden, wir uns mit dem nun fast fertigen neuen Roboter beschäftigen. Wir werden schauen wie die Programme funktionieren und was man anpassen oder eventuell ändern muss. Ausserdem werden wir uns auf den bald schon bevorstehenden Wettbewerb vorbereiten, der online stattfinden wird.
Challenge-Team
Diesen Monat lag unser Fokus auf den Motoren. Zum einen wollten wir diese an unseren Prototypen befestigen, zum anderen aber auch mit unserem Arduino steuern können.
Wie beim letzten Review besprochen haben wir also eine Lösung mit Übersetzung am einen Motor angepeilt, so dass wir die Motoren nebeneinander platzieren können.
Während David versucht hat, eine stabile Konstruktion am Prototypen zu errichten, um die Motoren zu befestigen, haben Julia und Lars versucht, die Motoren mit einem Arduino zu steuern.
Leider sind wir diesen Monat nicht ganz so weit gekommen, wie ursprünglich geplant. Die von David am Prototyp befestigten Motoren hielten nicht fest genug, so dass wir sie wieder entfernt haben und dies erneut versuchen müssen. Ebenso war es uns bis jetzt noch nicht möglich, die Motoren mit unserem Arduino zu kontrollieren.
Um diese Probleme zu lösen haben wir in der ersten Juni-Woche einen Workshop mit Vereinsälteren, bei welchem wir uns unsere Situation genauer anschauen werden.
In diesem Monat hat die Mechanik weiterhin am physischen Bau des Roboters gearbeitet. Die Produktion von den Subwheel-Felgen wurde fortgeführt. Bei dem Ausschneiden von diversen Bauteilen aus Carbon hat man diverse Fortschritte gemacht. Zum einen hat man, durch viel Übung, gelernt Kurven präziser zu schneiden. Zum anderen hat die Mechanik diverse Sägeblätter, von sehr fein bis sehr grob, getestet. Dadurch hat sie gelernt, welche Sägeblätter für welche Materialien und Formen geeignet sind. Durch diese Verbesserungen hat man es nun geschafft, die Carbon-Teile für ein Bot präzise auszusägen. Um die einzelnen Carbon-Teile zusammen zu bauen, braucht es Verbindungen. Solche Verbindungen hat die Mechanik gezeichnet, gedruckt und getestet. Bei den ersten Verbindungen gab es das Problem, dass sie den Carbon-Platten zu wenig Unterstützung gaben und dadurch die Platten brachen. Bei den zweiten Verbindungen hat die Mechanik dann die Verbindungen verlängert, mit zwei Schrauben pro Seite befestigt und die Muttern mit einem extra gefertigten Gegenstück ersetzt, um den Druck besser verteilen zu können. Der Test dieser Verbindungen steht noch an.
Elektronik
Die Elektronik hat im April die Lichtsensor Platinen fertig gelötet. Sie hat sich damit befasst, warum einige Teile in eine bestimmte Richtung auf die Platinen gelötet werden müssen. Die verkehrten Teile wurden mit dem Heissluftföhn entfernt und neue Teile wurden richtig herum auf die Platinen gelötet.
Die gelöteten Lichtsensoren
Software
Im letzten Monat hat das Softwareteam sich nochmal mit den Liniensensoren auseinandergesetzt. Die Sensoren funktionieren, aber es gibt immer noch Probleme mit dem Programm. Wo der Fehler liegt, hat man in der Zwischenzeit herausgefunden. Das Ganze ist komplizierter, wie am Anfang gedacht. Das nächste Ziel ist es, die Fehler zu beheben und die Programmierung, wenn möglich, zu vereinfachen. Auch wird bald der Roboter zusammengebaut, dann geht es daran das Programm zu testen und verschiedene Daten anzupassen, wenn diese nicht mehr stimmen sollten. Dann können die neuen Strategien getestet werden. Es wartet also noch eine Menge Arbeit vor dem Wettbewerb auf uns.
Im Monat März gab es sowohl beim Challenge/Junior Team, wie auch beim WM-Team beachtliche Erfolge zu feiern.
Challenge-Team
Diesen Monat haben wir die Farbsensoren fertig repariert und alle ausgetestet. Danach haben wir diese zusammengefügt, so dass wir diese später am Roboter fixieren können.
Ebenfalls haben wir uns mit dem Thema Distanzsensor befasst und uns für Ultraschallsensoren entschieden. Wir versuchen momentan, einen SRF08 zum Laufen zu bekommen.
David hat am Prototyp weitergearbeitet, so hat er nun das Mainboard an diesem befestigt.
Ende Monat haben wir uns noch mit Fabio getroffen, um unsere momentane Situation zu besprechen. Er konnte uns mit den Ultraschallsensoren weiterhelfen und wir haben mit ihm den Aufbau unseres Roboters besprochen.
WM Team
Mechanik
In diesem Monat hat die Mechanik sich auf die Fertigung einzelner Teile des Roboters fokussiert. Nach ersten Prototypen konnte die Mechanik nun mit der Massenproduktion der Subwheels starten. Anfänglich trat das Problem auf, dass die Alustange, aus der die Räder gefräst werden, sich verbog. Durch eine Reduzierung der Fräsgeschwindigkeit und veränderten Einstellungen gelang es dann der Mechanik das Problem zu beheben.
Einige Subwheels
Des Weiteren wurden erste Carbonteile ausgeschnitten. Hier handelt es sich aber eher noch um anfängliche Testausschnitte. Um die Präzision des Ausschneidens noch zu verbessern hat sich die Mechanik Tipps bei ehemaligen Mitgliedern geholt.
Zusätzlich hat die Mechanik damit begonnen sich erste Gedanken zu den Verbindungen für die Carbonplatten zu machen. Dafür hat sie sich ebenfalls Rat von den Ehemaligen geholt.
Elektronik
Die Elektronik hat im März weiter an den Lichtsensor Platinen gelötet. Mit den Teilchen, welche auf den Lichtsensor Platinen gelötet werden, hat sich die Elektronik genauer befasst. Sie hat gelernt, welche Teile für was zuständig auf den Platinen sind und warum wir sie unbedingt auf den Platinen brauchen.
Software
In diesem Monat haben wir vor allem an den Liniensensoren gearbeitet. Es war eine lange Prozedur, doch zum Schluss hat alles gut geklappt. Die erste Schwierigkeit war heraus zu finden warum es nicht funktioniert. Schliesslich stellte sich heraus, dass etwas im Code nicht stimmte. Doch nun funktionieren die Sensoren wieder Einwands frei. Ausserdem haben wir an einem neuen Goalie Programm gearbeitet und neue Strategien entwickelt. Mit der Strategie des Goalies sind wir schon fast fertig und auch die Strategie des Stürmers ist schon in Arbeit. Da es ein paar Änderungen im Spielfeld gab, haben wir uns zuerst mit dem Goalie beschäftigt. Im nächsten Monat werden wir die Ballfindung optimieren und an weiteren Strategien tüfteln.
In diesem Monat hat ein Helveticrobot an der Robocup Junior Soccer Sim Demo teilgenommen. Dies war ein virtueller durchgeführter Wettkampf, bei dem die Teams ihre Codes einschicken mussten. Für Helveticrobot war das eine gute Möglichkeit das Programm zu testen und daraus Verbesserungen für die Version für den Sommer zu finden. Nebenbei arbeiteten auch Elektronik, Mechanik und das Challenge-Team fleissig weiter.
Software
In diesem Monat wurde das Programm für den simulation soccer fertiggestellt und eingereicht. Bedauerlicherweise ist unser Team aufgrund eines unglücklichen Gegentreffers frühzeitig ausgeschieden. Des weiteren hat Anna-Chiara die Liniensensoren getestet woraufhin wir nun mit dem Testen der Sensoren fertig sind. Zu guter Letzt haben wir uns das Skript vom goalie genauer angeschaut und haben festgestellt, dass wir einiges überarbeiten müssen. Darauf werden wir uns im nächsten Monat fokussieren.
Elektronik
Die Elektronik hat im Februar gelernt, wie man die Kabel krimpt und herstellt, damit die Elektronik für den WM-Roboter eine sichere und zuverlässige Kabelverbindung zwischen den einzelnen Platinen herstellen kann. Mit genau solchen Platinen, genauer gesagt mit den Lichtsensor Platinen, hat die Elektronik sich in diesem Monat genauer beschäftigt und begonnen, solche zu löten, damit unser Team Ersatzplatinen hat, falls eine oder mehrere kaputt gehen sollten.
Mechanik
In diesem Monat hat die Mechanik mit den Bestellungen begonnen. Dabei musste sich die Mechanik erst einmal Gedanken machen, was sie den genau für Material benötigt. In diesem Schritt hat sie zudem etwas über die Zusammensetzung, Eigenschaften und Verwendung verschiedener Materialien wie zum Beispiel CFK gelernt. Hiernach konnte sie dann das Material bestellen.
Des Weiteren hat die Mechanik mit dem physischen Bau einzelner Teile des Roboters begonnen. Ein Beispiel dazu sind die Felgen für die Subwheels. Die Subwheels sind diejenigen Räder, die an der Aussenseite des Omniwheel senkrecht zu deren Laufrichtung befestigt werden und somit eine Bewegung in alle Richtungen ermöglichen. Diese Subwheelfelgen hat die Mechanik aus Aluminium selbst an der Drehbank geformt. Um mit dieser Maschine umzugehen hat sich die Mechanik bei dem technischen Dienst der Bündner Kantonsschule Hilfe in Form einer Einführung geholt. Die Mechanik experimentiert momentan noch an den idealen Subwheelfelgen, wird aber bald im grossen Stil produzieren können.
Erste Subwheelfelge
Challenge-Team
Im letzten Monat haben wir mit unserem Prototyp aus Holz weitergearbeitet. Für die Motoren haben wir immer noch keine abschliessende Lösung gefunden.
Gian-Reto hat sich noch mal mit uns getroffen und uns mit den Farbsensoren und den Motorboards geholfen. Wir wissen jedoch noch nicht genau welches Motorboard wir schlussendlich verwenden werden.
Damit wir bereits weitermachen konnten, hat David angefangen ältere Farbsensoren zu reparieren, damit wir diese verwenden können.
Wir haben auch mit dem Pi-Bot weitergearbeitet und unseren Linienfolger weiter verbessert.
Ausserdem haben wir uns dafür entschieden Lithium-Ionen-Akkus zu verwenden. Dadurch sollten wir weniger Probleme mit den schwankenden Batterieladezuständen haben.