Die diesjährige RoboCupJunior Soccer Championship (WM) fand virtuell vom 22.6.2021 bis am 28.6.2021 statt. Unser WM-Team nahm in Kategorie Soccer Lightweight teil. In dieser Kategorie ging es darum individuelle Challenges und eine SuperTeam Challenge (Zusammen mit anderen Teams) zu lösen. Diese Challenges musste man jeweils physisch, also mit echten Robotern lösen, die Lösung filmen und das Video einschicken.
Nach den Challenges musste man jeweils noch an einem Interview teilnehmen, in welchem man Erklärungen zur gewählten Lösung geben konnte. Diese Interviews fanden im virtuellen Raum Gather.Town statt. Gather.Town ist eine Plattform, bei der es einen videospielähnlichen Raum gibt, in dem man sich mit einem Avatar bewegen kann und mit anderen Leuten per Videoanruf kommunizieren kann.

Dummerweise mussten wir dieses Jahr während der Veranstaltung trotzdem zur Schule. Demnach hatten wir jeweils sehr wenig Zeit, um die Challenges zu lösen.
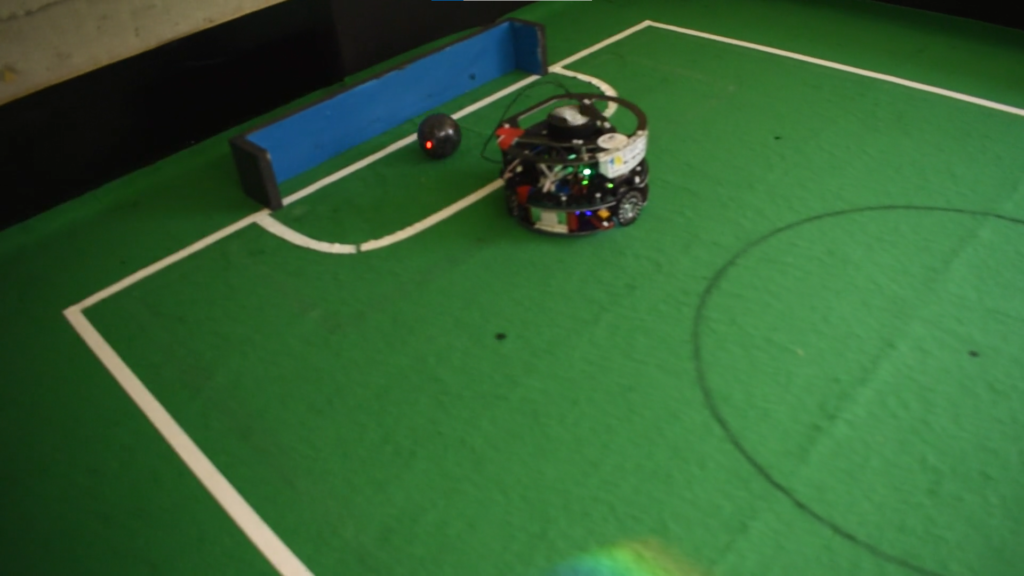
Die erste Challenge war es auf einem Fussballfeld für Roboter möglichst viele Goals in einer Minute zu schiessen. Voller Motivation haben wir daran zu arbeiten begonnen. Der Roboter hatte allerdings ein Problem mit der Orientierung auf dem Feld, das auf den Code zurückzuführen war. Das Softwareteam arbeitete daran bis spät in die Nacht hinein, konnte das Problem aber nicht ganz beheben. Schlussendlich erreichten wir in dieser Challenge den 12. Rang.
Für die SuperTeam-Challenge haben wir zuerst die anderen Teams kontaktiert und haben uns die Aufgaben aufgeteilt. An unserer Aufgabe haben wir hart gearbeitet, konnten sie aber aus Zeitgründen nicht ganz fertigstellen.
Trotz der knappen Zeit neben der Schule war die WM für uns eine wertvolle Erfahrung. Wir lernten über Gather.Town Gleichgesinnte kennen und konnten uns mit ihnen über Robotik unterhalten. Zudem war es für viele von uns der erste internationale Robotikwettbewerb. Schliesslich lernten wir auch besser unter Zeitdruck zu programmieren oder sonstige Arbeiten zu verrichten.