Im Monat März gab es sowohl beim Challenge/Junior Team, wie auch beim WM-Team beachtliche Erfolge zu feiern.
Challenge-Team
Diesen Monat haben wir die Farbsensoren fertig repariert und alle ausgetestet. Danach haben wir diese zusammengefügt, so dass wir diese später am Roboter fixieren können.
Ebenfalls haben wir uns mit dem Thema Distanzsensor befasst und uns für Ultraschallsensoren entschieden. Wir versuchen momentan, einen SRF08 zum Laufen zu bekommen.
David hat am Prototyp weitergearbeitet, so hat er nun das Mainboard an diesem befestigt.
Ende Monat haben wir uns noch mit Fabio getroffen, um unsere momentane Situation zu besprechen. Er konnte uns mit den Ultraschallsensoren weiterhelfen und wir haben mit ihm den Aufbau unseres Roboters besprochen.
WM Team
Mechanik
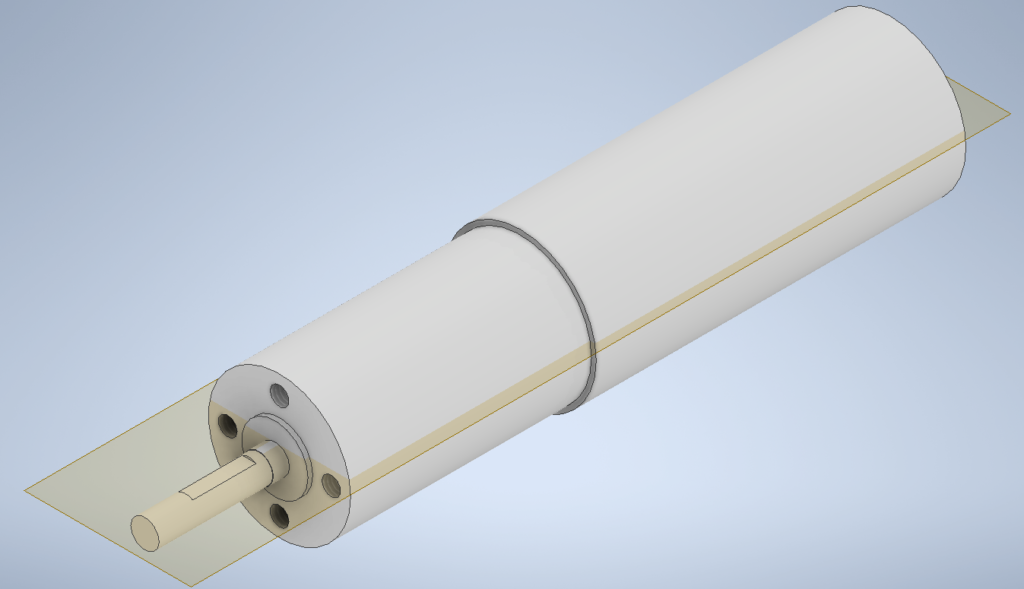
In diesem Monat hat die Mechanik sich auf die Fertigung einzelner Teile des Roboters fokussiert. Nach ersten Prototypen konnte die Mechanik nun mit der Massenproduktion der Subwheels starten. Anfänglich trat das Problem auf, dass die Alustange, aus der die Räder gefräst werden, sich verbog. Durch eine Reduzierung der Fräsgeschwindigkeit und veränderten Einstellungen gelang es dann der Mechanik das Problem zu beheben.

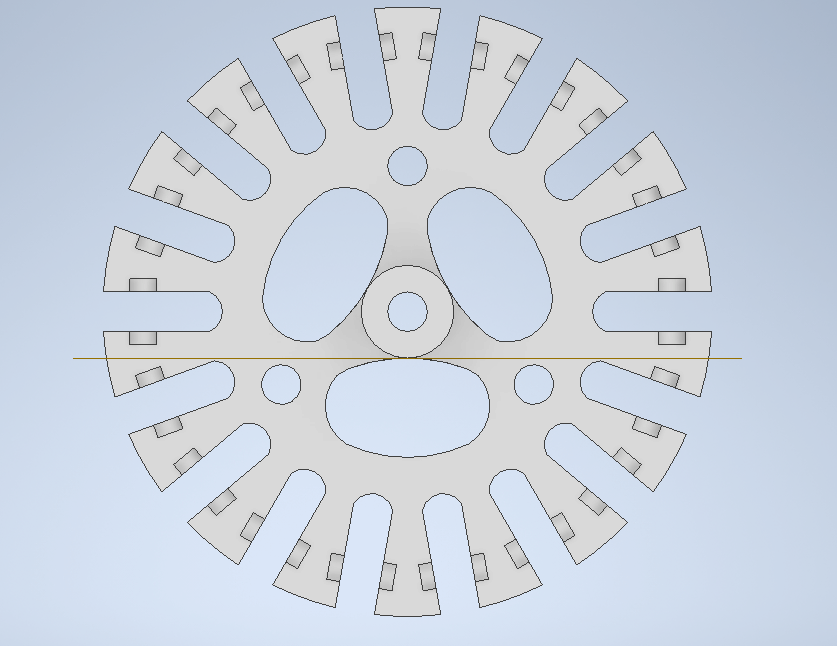
Des Weiteren wurden erste Carbonteile ausgeschnitten. Hier handelt es sich aber eher noch um anfängliche Testausschnitte. Um die Präzision des Ausschneidens noch zu verbessern hat sich die Mechanik Tipps bei ehemaligen Mitgliedern geholt.
Zusätzlich hat die Mechanik damit begonnen sich erste Gedanken zu den Verbindungen für die Carbonplatten zu machen. Dafür hat sie sich ebenfalls Rat von den Ehemaligen geholt.
Elektronik
Die Elektronik hat im März weiter an den Lichtsensor Platinen gelötet. Mit den Teilchen, welche auf den Lichtsensor Platinen gelötet werden, hat sich die Elektronik genauer befasst. Sie hat gelernt, welche Teile für was zuständig auf den Platinen sind und warum wir sie unbedingt auf den Platinen brauchen.
Software
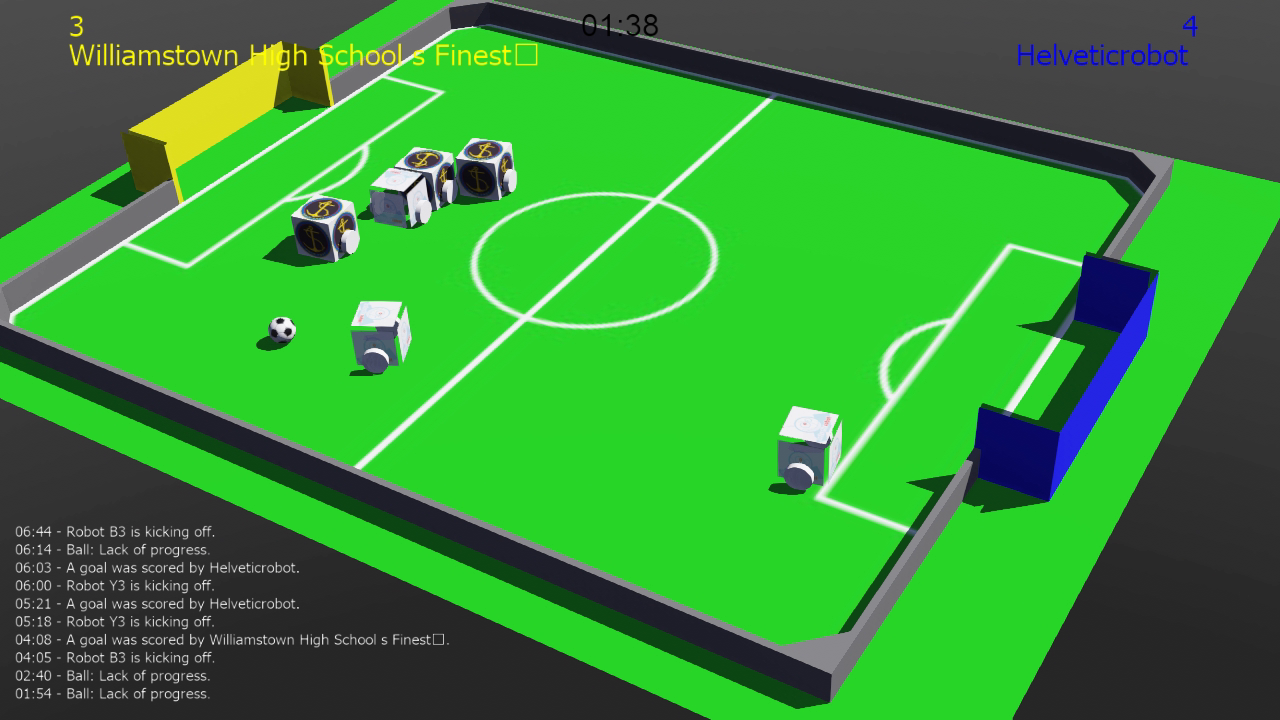
In diesem Monat haben wir vor allem an den Liniensensoren gearbeitet. Es war eine lange Prozedur, doch zum Schluss hat alles gut geklappt. Die erste Schwierigkeit war heraus zu finden warum es nicht funktioniert. Schliesslich stellte sich heraus, dass etwas im Code nicht stimmte. Doch nun funktionieren die Sensoren wieder Einwands frei. Ausserdem haben wir an einem neuen Goalie Programm gearbeitet und neue Strategien entwickelt. Mit der Strategie des Goalies sind wir schon fast fertig und auch die Strategie des Stürmers ist schon in Arbeit. Da es ein paar Änderungen im Spielfeld gab, haben wir uns zuerst mit dem Goalie beschäftigt. Im nächsten Monat werden wir die Ballfindung optimieren und an weiteren Strategien tüfteln.