Dieses Wochenende fanden die Austrian Open in Wien statt. Helveticrobot nahm mit dem WM-Team in der Kategorie Soccer und mit dem Nachwuchsteam in der Kategorie Rescue B teil. Erfolgreich konnte Helveticrobot das Wochenende beschliessen mit vielen neuen Eindrücken und dem 2. Podestrang in Soccer!

Das Rescue und das Soccer-Team 2014,
hinten: Remo Marugg, Davide Ferrari, Robert Steffner, Joel Seeliger, Valentin Jenny, Andrea Cavelti
vorne: Sara Michel, Sandra Nedic, Riccarda Albertin (v.l.n.r)
Challenge-B-Team: Der erste Tag an den Austrian Open
Etwas verschlafen sind wir um etwa 7:30 Uhr in Wien aus dem Nachtzug gestiegen und im Nieselregen zum Austragungsort gegangen. Wir waren zeitig da, richteten unseren Arbeitsplätze ein und informierten uns über allfällige Planänderungen. Unglücklicherweise waren unsere Teams in unterschiedlichen und recht weit von einander entfernt liegenden Zimmern einquartiert worden, weswegen wir die Werkzeuge aufteilen und später ständig hin und her laufen mussten.
Erster Punkt auf der Tagesordnung für den Samstag: Roboter auf die veränderten Bedingungen auf dem neuen Spielfeld zu kalibrieren. Ausserdem haben wir einen grossen Teil der Zeit uns darüber beraten wie wir die ziemlich steile Rampe hinauf kommen sollten. Schliesslich sind wir auf die Idee gekommen, dass wir mit doppelseitigem Klebeband als „Reifen“ vielleicht genug Reibung haben werden um die Rampe hoch zu kommen. Wir haben so lange darüber diskutiert dass wir sehr hetzten mussten, um noch rechtzeitig an unser angesetztes Interview mit den Juroren zu kommen. Diese kleine Fragerunde meisterten wird mit Bravur. Nach einigem Programmieren und einiger Verbesserungsarbeit, ging es dann in die wohlverdiente Mittagspause.
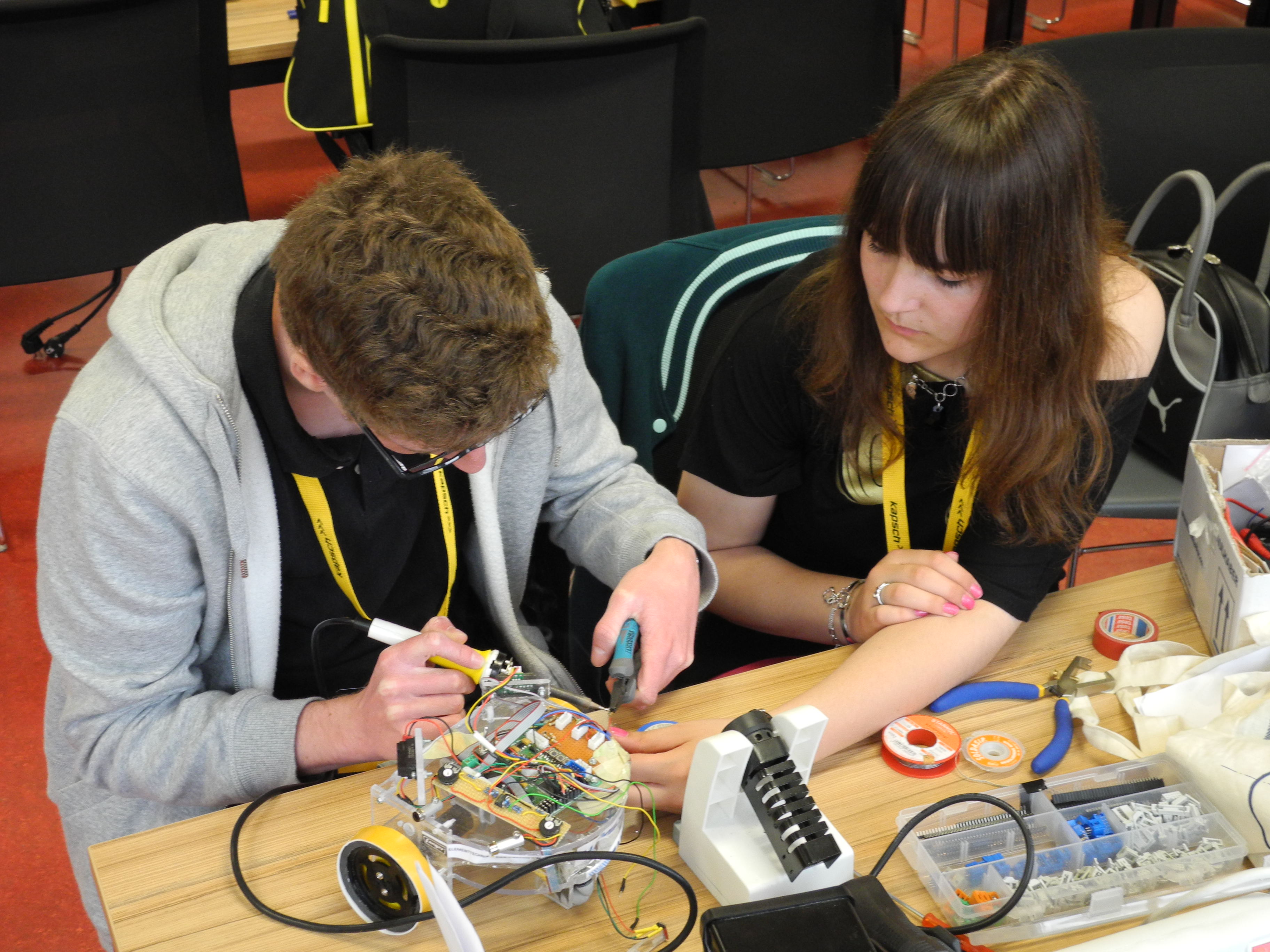
Der Samstagnachmittag begann mit einem sehr grossen Schock. Etwa fünf Minuten vor Beginn unserer ersten Runde, wollten wir alle Kabel einstecken, damit alles breit ist. Doch dabei gab es auf einmal einen riesigen Funken und sehr viel Rauch. Somit mussten wir anschliessend zu den Schiedsrichtern um ihnen zu erklären, was geschehen ist und das wir nicht starten können. Sie gaben uns dann jedoch netterweise eine halbe Stunde Zeit, um unseren Roboter zu reparieren. Wir konnten das Problem jedoch nicht in dieser sehr knappen Zeit beheben und mussten den ersten Lauf komplett aussetzen. Eine Zeit lang befürchteten wir sogar bereits, dass dies für uns bereits das Ende des Turniers ist. Wir gaben jedoch nicht so schnell auf und konnten das Board nach sehr langem und intensivem Arbeiten reparieren. Dannach blieb uns jedoch nicht mehr viel Zeit übrig, um den Roboter weiter zu testen und daran zu arbeiten. Wir konnten lediglich noch die Räder neu bekleben, um die Rampe hochfahren zu können, da dies in Chur noch nicht wunschgetreu funktionierte. Dieses Problem konnten wir mit Hilfe von doppelseitigem Klebeband und einer improvisierten Rampe lösen und anschliessend testen. Dannach kam jedoch bereits der nächste Tiefschlag. Als wir zum zweiten Lauf antreten wollten und den Roboter starteten, bemerkten wir, das etwas mit dem Wärmesensor nicht stimmen konnte, da unser Roboter die ganze Zeit Opfer meldete. Später fanden wir heraus, dass der Sensor nicht funktionierte, weil sein Stecker kaputt war und wir es leider nicht vorher bemerkt haben.

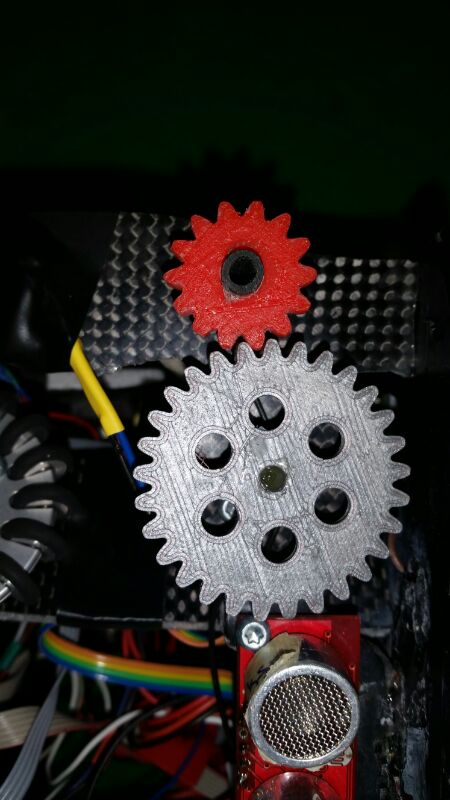
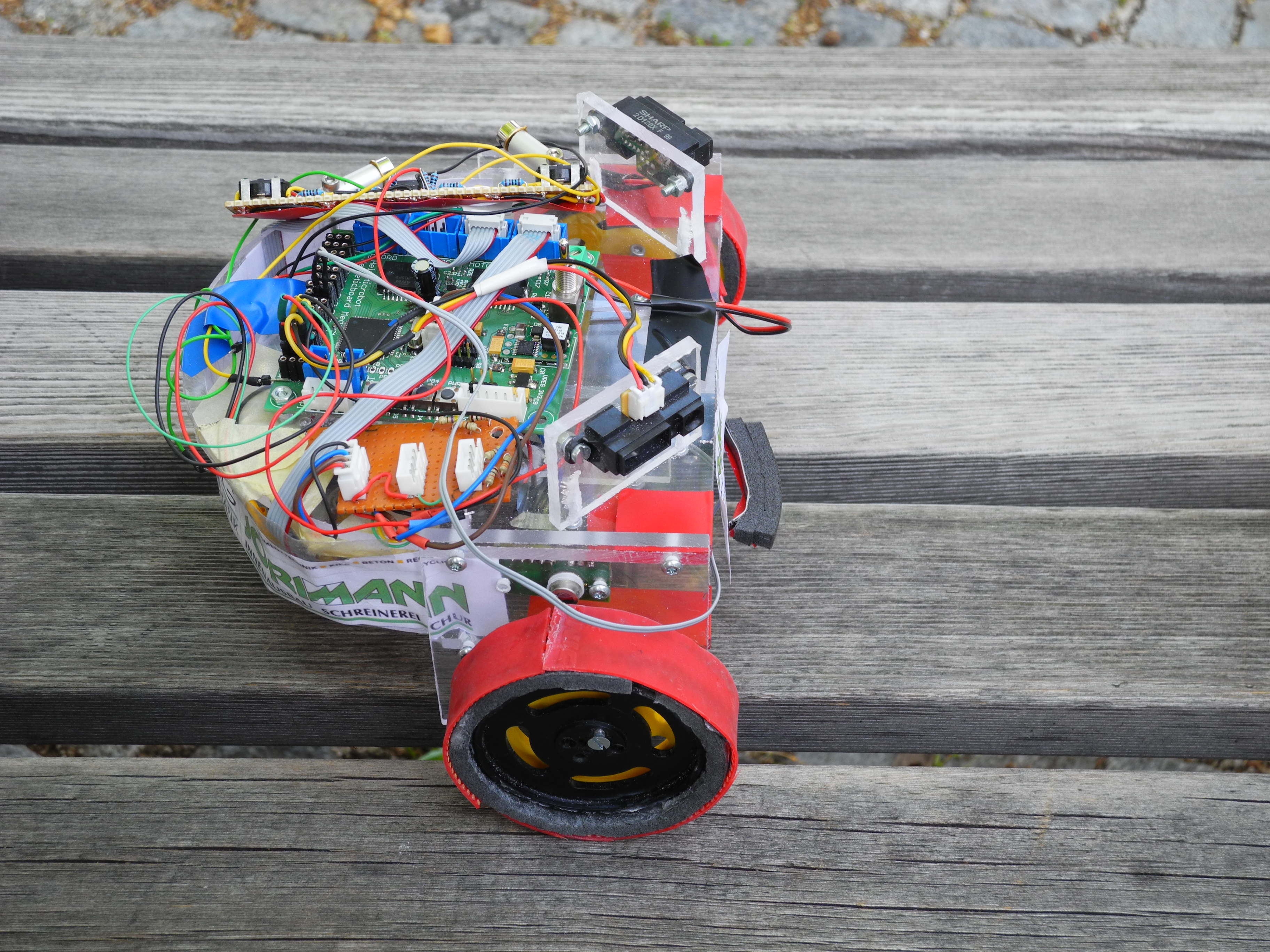
Laufende Verbesserungen am Rescue-Roboter
WM-Team: Erster Tag an den Austrian Open in Wien
Der erste Termin für das Soccerteam war am Samstag ein Interview, in dem wir zweien Juroren unser Konzept erklären mussten, und kontrolliert wurde, ob die mechanischen Beschränkungen eingehalten wurden. Der Kompass war etwas zu hoch montiert und musste nach unten versetzt werden, aber sonst waren die Bots regelkonform. Als wir endlich Zeit hatten, die Roboter zu testen, traten gravierende Probleme mit der Orientierung auf. Wir konnten diese in der kurzen Zeit bis zum ersten Spiel nicht mehr beheben und mussten das erste Spiel aufgeben. Wir arbeiteten daraufhin konzentriert weiter, doch es zeigte sich, dass es nicht möglich wäre, die Ursache der Probleme in solch kurzer Zeit herauszufinden und zu lösen und änderten deshalb die Strategie drastisch: Die Ultraschall-Distanzmesser (und damit verbunden auch die Lichtsensoren) benutzten wir gar nicht mehr und den Ball stiessen wir mit der falschen Seite des Bots, weil dies noch am besten funktionierte und auch der Kicker defekt war. Wir hofften so zumindest einigermassen spielfähig zu sein.
Trotz schlechtem Wetter und blankliegenden Nerven, passierte etwas was wir nie erwartet hätten. Das Spiel begann und unser Roboter raste auf den Ball, verkehrt herum, zu. Sehr aggressiv von aussen, aber als Gegenstand sehr stabil, gewannen wir das Match 6:0, durch schnelles Angreifen und Eigentore der Gegner. Wir selber konnten es nicht glauben. Vor dem Match waren wir sicher, dass wir das Spiel verlieren würden, doch zu unserem Gunsten ging es gut. Auch das dritte Spiel am Tag haben wir mit dem selben Programm und der selben Strategie für uns gewinnen können. Auch hier lag das Glück auf unseren Seite. Mit 13:0 entschieden wir das Spiel für uns. Somit waren wir qualifiziert für das Halbfinale am nächsten Tag. Mit einem gemischten Gefühl gingen wir Richtung Hotel um uns auf das Nachtessen vorbereiten zu können. Dabei wurde diskutiert wie wir die Spiele am nächsten Tag für uns entscheiden könnten.
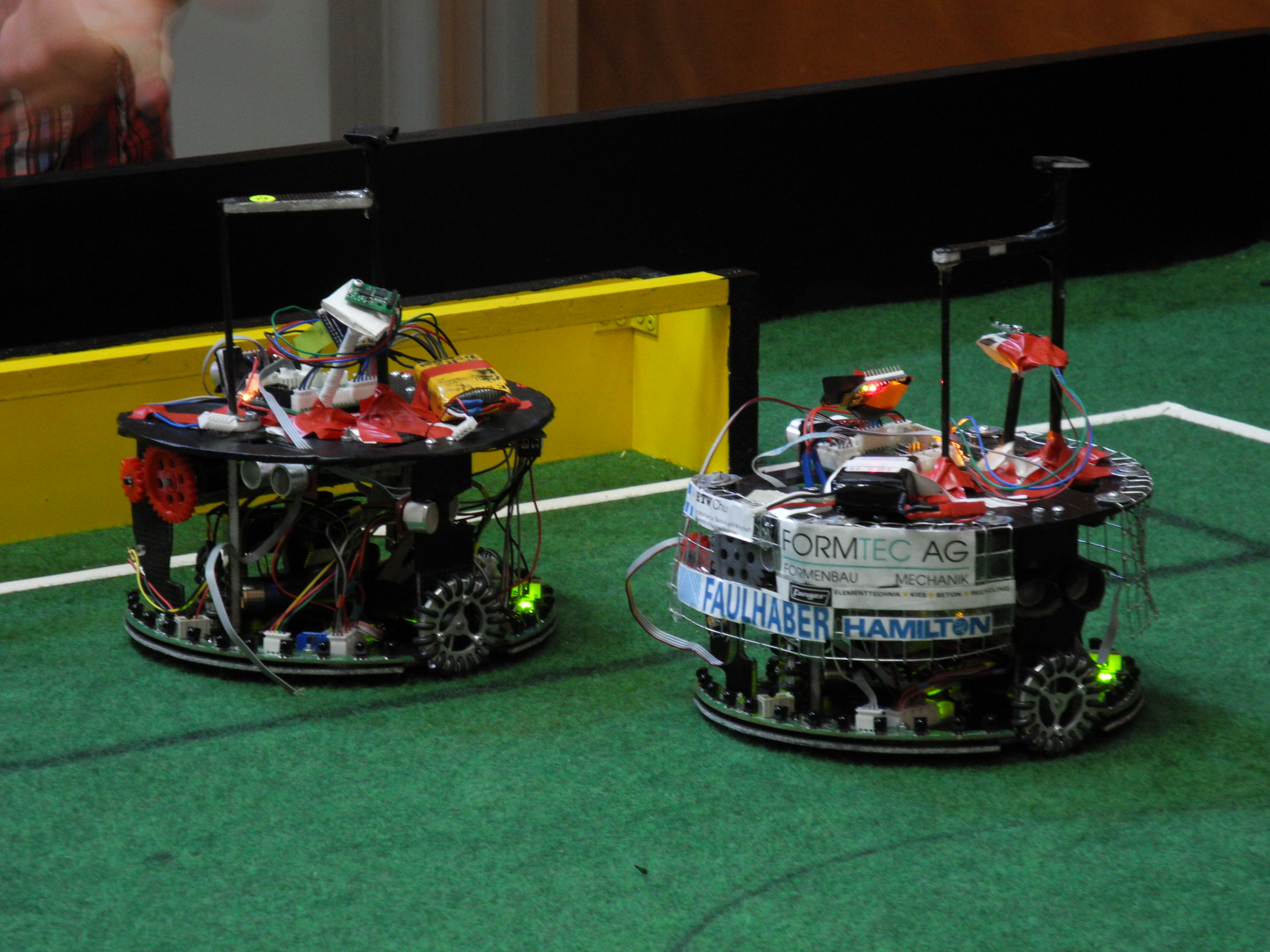
Die Soccer-Roboter in Aktion.
Challenge-B-Team: Verbesserungen am zweiten Tag
Um halb sieben standen wir am Sonntagmorgen auf, damit wir um halb neun wieder im Technikum eintreffen könnten. Wir hatten heute noch viel zu tun, denn um 12:15 Uhr stand unser letzte Lauf bevor! Und zwar mussten wir die Räder des Roboters mit dem richtigen Stoff bekleben, damit er dann gut die Rampe rauf fahren kann. Dafür nahmen wir den Gummi von Ping-Pong-Schlägern. Zu unserer Zufriedenheit klappte es. Im Laufe des Morgens merkten wir, dass an man an solch einem Anlass immer wieder bereit sein muss Schwierigkeiten und Fehler schnell beheben zu können. So mussten hatten wir auch mit kaputten Lötstellen der Akkus zu kämpfen. Unser grösstes Problem war jedoch, dass das Programm zum Folgen der Wand manchmal nicht richtig funktionierte. Die Zeit reichte nicht die Ursache dafür zu finden. Es gelang uns jedoch die Strategie so anzupassen, das der Fehler nicht mehr auftauchte. Allerdings konnten wir alle anderen Probleme recht gut beheben. Wenn wir nicht gerade mit der Verbesserung des Roboters beschäftigt waren, schauten wir einen Match des anderen Helveticrobot-Teams, erkundigten uns über einige Aspekte der Regeln, die wir nicht verstanden oder testeten andere Dinge aus.
Um 12:15 Uhr war unser letzter Testlauf angesagt und wir waren äusserst gespannt auf das Resultat. Leider funktionierte einer der Sensoren nicht richtig, weswegen der Roboter nicht die vorgesehenen Bewegungen machte. Er funktionierte jedoch besser als bei unseren Testläufen am Samstag. Es reichte aber leider nicht aus. Damit war der Wettbewerb für uns vorbei und wir waren auch um eine grosse Erfahrung bereichert worden. Wir nehmen nun unsere gesammelten Erfahrungen mit zum nächsten Wettbewerb, um besser gewappnet zu sein für Probleme und Unannehmlichkeiten.

Der Rescue-Roboter 2014
WM-Team: Zweiter Podestplatz für Helveticrobot in der Kategorie Soccer!
Nach einem guten Frühstück gingen wir wieder zum Technikum. Mit neuer Energie versuchten wir den Fehler zu finden, leider vergeblich. Dann stand das Halbfinale an und wir waren immer noch nicht ganz zufrieden. Wir erwarteten zu verlieren. Völlig überraschend konnten wir das Halbfinale für uns entscheiden, da es besser funktionierte als erwartet und unsere Gegner Probleme mit der Elektronik hatte. Nun waren wir zum Erstaunen von uns allen im Final. Sofort fingen wir mit den Verbesserungen am Bot, um möglichst gut im Finale zu bestehen, denn wir erfuhren bald, dass wir gegen das starke italienische Team antreten würden. Um 12:40 Uhr war es dann so weit, das Finalspiel begann. Leider konnten wir immer noch nicht feststellen, wieso die Orientierung des Roboters verkehrt herum ist. So beliessen wir die Stürmer-Strategie und verbesserten nur die Goalie-Strategie. Gleich beim Anpfiff stürmten unsere italienischen Gegner auf den Ball und unser Goal mit bemerkenswerter Zielstrebigkeit zu. Gegen diese Angriffe konnten wir nicht bestehen und unsere Roboter fuhren etwas ziellos im Feld herum. Nach dem Match das ernüchternde Ergebnis: Die Italiener gewannen das Spiel mit 25:0. Damit stand fest: Helveticrobot ist auf dem zweiten Podestplatz!
Wir sind überaus zufrieden mit dem unerwarteten zweiten Rang und haben viele nützliche Erfahrungen für Brasilien sammeln können.

Die Soccer-Roboter 2014 mit dem Preis zum 2. Rang