26.07.2017, Setupday
Nach einer langen Reise (6 Stunden Flug von Zürich nach Dubai, danach 9 Stunden von Dubai nach Tokyo und zuletzt eine zweistündige Zugfahrt von Tokyo nach Nagoya) sind wir am Abend des 25. Juli in unserem Hotel angekommen. Nach ein bisschen Schlaf und einer weiteren Zugfahrt standen wir um 09:00 Uhr müde aber voller Vorfreude vor den Türen der Wettkampfhallen im Hafen von Nagoya. Voller Zuversicht, dieses Jahr besser abzuschneiden als letztes Jahr, holten wir unsere Wettkampfausweise ab und bezogen unseren Arbeitstisch, an welchem wir die nächsten 4-5 Tage verbringen werden. Nach einem kurzen Check der Roboter machten wir uns auch direkt an die Arbeit.
Am ersten Tag, dem Setupday, finden zwar keine Wettkämpfe statt, jedoch ist es eine prima Gelegenheit die Roboter auf den richtigen Spielfeldern zu testen und allfällige Fehler zu korrigieren. Ausserdem fand an diesem Tag auch das Teamwork-Interview statt, an welchem, wie der Name bereit sagt, die Zusammenarbeit im Team bewertet wird. Dieses Interview fand für uns um 12:00 Uhr statt. Zu allererst bekamen wir die Aufgabe, mit vier A4 Blättern, fünf Stücken Klebestreifen drei Murmeln so lange wie möglich in Bewegung zu halten. Dafür hatten wir fünf Minuten Zeit. Danach hatten wir 10 Minuten Zeit unsere Roboter in irgendeiner Weise zu präsentieren. Zum Schluss haben sie uns noch drei spezifische Fragen gestellt, welche nur einer des Teams beantworten durfte. Unserer Meinung nach lief das Interview gut und deshalb gingen wir danach auch erstmal etwas essen. Da wir die Karte nicht lesen konnten, haben wir einfach irgendwas bestellt und danach mit Stäbchen aufgegessen. Essen mit Stäbchen müssen wir alle auf jeden Fall noch üben.
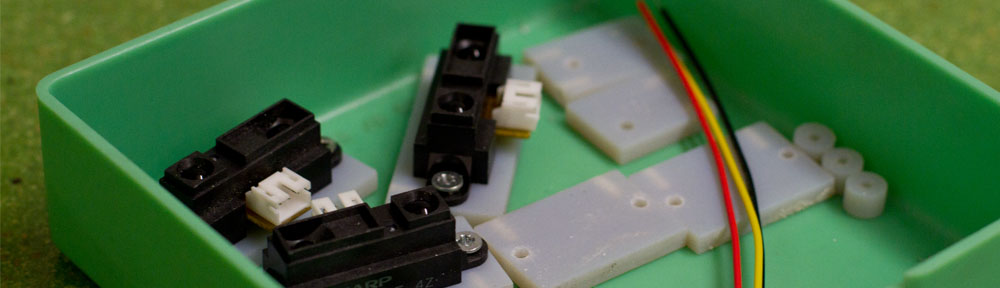
Nach dem Essen ging die Fehler- und Lösungssuche dann weiter. Wir haben Zahnräder ausgetauscht, Linien- und Infrarotsensoren getestet und noch vieles mehr. Kurz nach 20:00 Uhr sind wir dann aus den Hallen geschickt worden. Nachdem wir die Sachen ins Hotel getan haben, waren wir noch etwas essen um dann gestärkt ins Bett zu gehen.

27.07.2017, 1. Wettkampftag
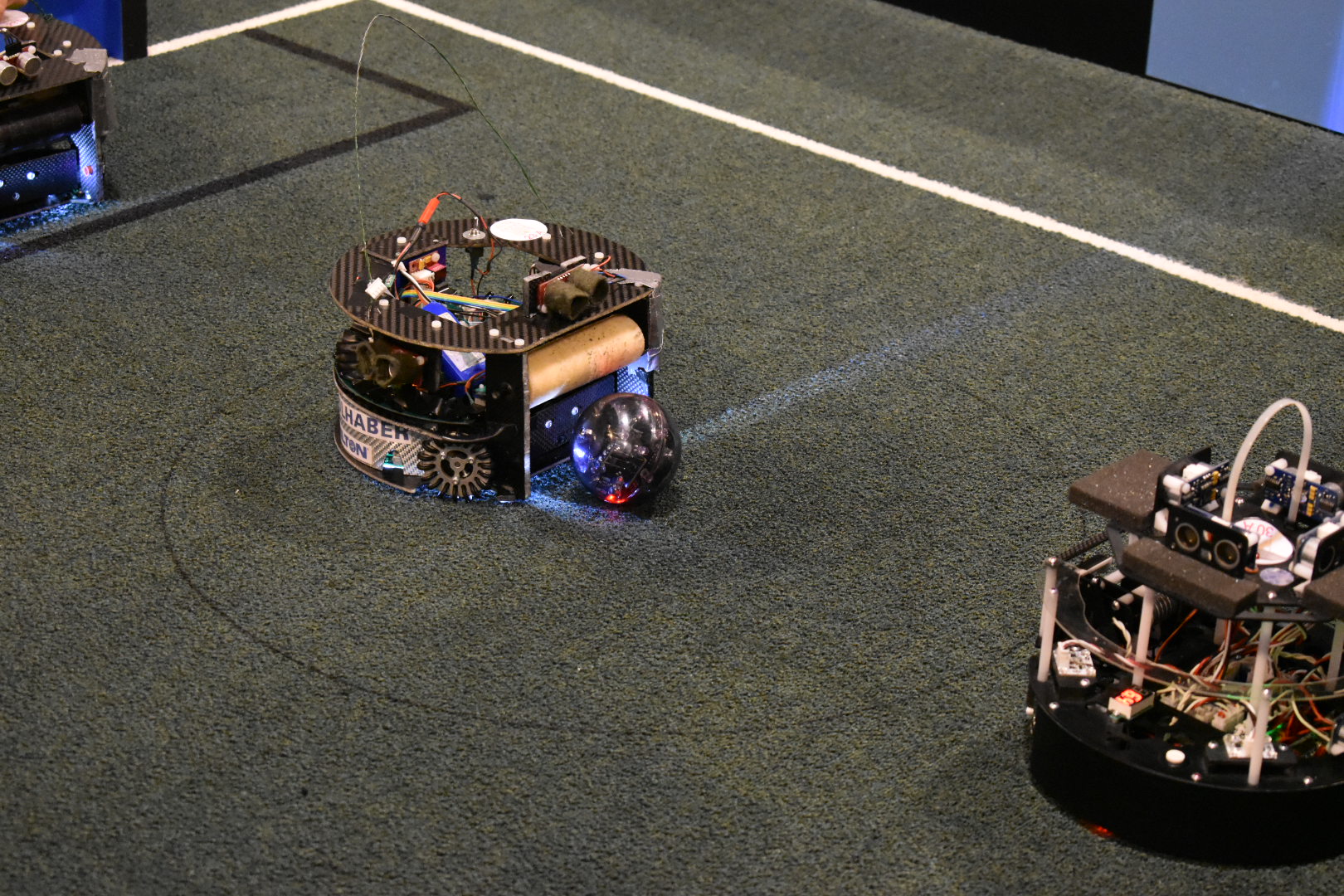
Nach einem stärkenden Frühstück um 7:00 Uhr sind wir heute ein bisschen früher bei der Weltmeisterschaft angekommen, denn vor dem ersten Spiel um 10:10 Uhr mussten noch einige Dinge getan werden. So wurden zum Beispiel die Sponsoren endgültig an den Hüllen befestigt, Dribblerrollen ausgetauscht und noch einiges mehr. Das erste Spiel gegen Brasilien haben wir 5:0 gewonnen. Leider war nach dem ersten Spiel aber klar, dass wir noch viel zu tun haben. Vor allem bei der Linienerkennung gab es noch viel Luft nach oben. Weil man jedes Mal wenn der Roboter die Grenzlinien übertritt, ihn für eine Minute aus dem Spiel nehmen muss, war das auch unser grösstes Problem. Man kann schliesslich keine Tore schiessen, wenn man keine Roboter auf dem Spielfeld hat.
Das zweite Spiel fand um 13:40 statt und wir mussten gegen Kroatien antreten. Dieses Spiel hatte gar nicht gut angefangen. Der Gegner hatte zwar auch nicht voll funktionierende Roboter, trotzdem führten sie mit 6:1 zur Pause. In der zweiten Hälfte kehrte das Glück jedoch zu uns zurück. Die Kroaten mussten ihre Roboter immer wieder wegen Beschädigungen aus dem Spiel nehmen und so konnten wir Tore erzielen. Am Ende haben wir doch noch ein Unentschieden herausgeholt, das Spiel endete mit 6:6.
Nach einer Stärkung ging es dann mit dem ersten Superteam-Spiel weiter. In diesem Jahr spielen wir mit Italien, Slowenien, Singapur und Russland auf einem grossen Spielfeld gegen andere zusammengewürfelte Superteams. Bei diesen Spielen darf jedes Teammitglied (jedes Land) einen Roboter ins Spielfeld setzen. Dabei ist es egal, ob man mit fünf Stürmern oder mit fünf Torhütern spielt. Dieses erste Spiel lief allerdings nicht so toll. Unser Roboter hat zwar die Linien erkannt, den Ball jedoch nicht. Die Ballsensoren funktionierten um einiges schlechter als noch in Chur. Der Roboter sah deshalb zufällig Bälle, welche gar nicht existierten und kreiselte so während des ganzen Spiels übers Spielfeld. Unser Superteam hat 7:1 verloren.
Wir hatten also 2 Roboter. Der eine konnte Linien erkennen und der andere sah den Ball, doch keiner konnte beides. Dies galt es zu ändern und so arbeiteten wir weiter. Gegen Abend hatten wir dann einen gut und einen teilweise funktionierenden Roboter. Mit wiederkehrender Hoffnung verliessen wir dann die Hallen und gingen zurück ins Hotel.


Ein Unentschieden gegen Kroation. Beide Teams können mit dem 6:6 leben.