Nach einer geringen Portion Schlaf und Erholung machten wir uns am Morgen auf dem Weg zum Wettbewerbsgelände. Der zweite und zugleich letzte Wettkampftag stand an, wobei unsere beiden Teams noch unterschiedlich viel Arbeit vor sich hatten. Das Challenge-Team hatte nur noch ein Wertungslauf um für eine bessere Platzierung im Schlussklassement zu kämpfen. Das WM-Team hingegen musste sich zuerst im Halbfinale beweisen, um dann hoffentlich am Finale teilhaben zu können. So war man zu Beginn des Tages begierig, alles Mögliche für den Erfolg zu tun.
Beim Challenge-Team ging es zuerst nochmals an die Erkennung der grünen Flächen, denn diese funktionierte noch nicht wunschgemäss. Dies wurde jedoch ziemlich flott fertiggestellt. Als nächstes hat das Team die ihnen zugeteilte Arena für den letzten Wertungslauf inspiziert und allfällige kritische Punkte gesucht. Um dies optimal zu testen haben sie mit ein bisschen Klebeband die Arena nachgebaut und angefangen, den Roboter für den letzten Wertungslauf vorzubereiten. Dann war es auch ziemlich schnell wieder soweit: Der letzte Wertungslauf ihres einzigen Wettbewerbes dieser Saison stand an. Dieser klappte zwar gut, doch nicht so wie erhofft. Das grösste und auch ziemlich einzige Problem war die Geschwindigkeit des Roboters. Jeder Wertungslauf dauert nämlich genau 8 Minuten, und wenn der Roboter nicht genügend schnell ist, kann man leider nicht alle Punkte erzielen. Mit 101 erreichten Punkten war dieser Lauf aber trotzdem noch akzeptabel, womit das Team am Ende des Wettkampfs eine Gesamtpunktzahl von 268 Punkten erreichte. Das Team klassierte sich damit auf Platz 7 von insgesamt 37 Teams!

Der Roboter des Challenge-Teams
Beim WM-Team musste vor allem an der Software gearbeitet werden, die Stürmer Strategie brauchte eine Erweiterung um sich gegen das bessere Team ansatzweise beweisen zu können. Trotzdem wurde als erstes noch eine Dribblerrolle ausgetauscht, weil die «alte» eine Nummer zu dick mit Latex bestrichen worden war und der Roboter auf dem Feld spulte anstelle der gewünschten Fahrwirkung. Danach ging es aber wirklich ran an den Speck. In kürzester Zeit konnten die Programmierer des Teams eine Strategie auf die Beine stellen, mit welcher eine Chance bestand einen spannenden Final auszutragen. Die Idee war, dass der Stürmer den Ball in den Dribbler nimmt, sich dreht, rückwärts zum gegnerischen Tor fährt und sich um den gegnerischen Goalie herumdreht um diesem jegliche Angriffsmöglichkeit auf den Ball zu nehmen. Für die kurze Zeit in der diese Strategie programmiert wurde funktionierte diese auch sehr gut. Einzig der Kicker war noch ein bisschen zu schwach und die Drehung vor dem Tor passierte noch ein klein wenig zu spät, sonst war es aber eine mehr als akzeptable Lösung um schöne Tore zu schiessen. Wegen ungenügender Tests wurde im Halbfinal noch auf die neue Strategie verzichtet und mit der gleichen Strategie wie am Vortag gefahren: Ball suchen, nehmen und gerade zum gegnerischen Goal schieben. Trotz des noch nicht verbesserten Stürmers konnte das Halbfinal mit 10 Toren Differenz gewonnen werden. Somit standen die Finalteilnehmer fest: Unser WM-Team gegen das beste österreichische Soccer Lightweight Secondary Team. Und was ein nervenzerreissender Final das war! Nach einem fatalen ersten Goal gegen uns ging es aber schnell bergauf. Das gegnerische Team hatte Probleme mit der Linienerkennung und war so oftmals nur mit dem Torhüter auf dem Spielfeld. Da schlug dann die neue Strategie zu. Obwohl der gegnerische Torhüter sehr gut und schnell auf den Ball reagiert hat, konnten wir einige Tore schiessen indem wir uns ihm rückwärts annäherten und dann im letzten Moment um ihn herum drehten. In der zweiten Halbzeit, als wir bereits einen guten Vorsprung gewonnen hatten, kam der Stürmer der Österreicher zurück ins Spiel. Sogleich erzielte dieser drei Tore, es wurde uns etwas bange. Glücklicherweise reagierte J, unser Stürmer, darauf und schoss wunderbare Goals zwischen den beiden Pushbots hindurch, nach wie vor mit der Strategie mit der verkehrten Anfahrt und Drehung vor dem Goal. Alles sah sehr gut aus bis unsere Gegner es noch einmal krachen liessen und wiederum drei Tore in Folge schossen, oder sollte man eher drücken sagen? Wiederum reagierte unser Stürmer aber mit Gegentoren und das Match wurde mit 10:7 für Helveticrobot entschieden. Neben den schönen Goals war das Spiel allzeitig spannend und intensiv und wohl sehr interessant zu betrachten! Zusätzlich sorgten die Schiedsrichter für etwas Pausenunterhaltung als die Stürmer beider Teams wegen verlassen des Spielfeldes deaktiviert waren. Als beide Goalies den Ball aus ihrer Zone anstarrten liessen die Schiedsrichter denn Ball einfach quer darüber schiessen um beide Goalies zu ein wenig mehr Bewegung zu animieren und die anhaltende Langeweile zu überbrücken.

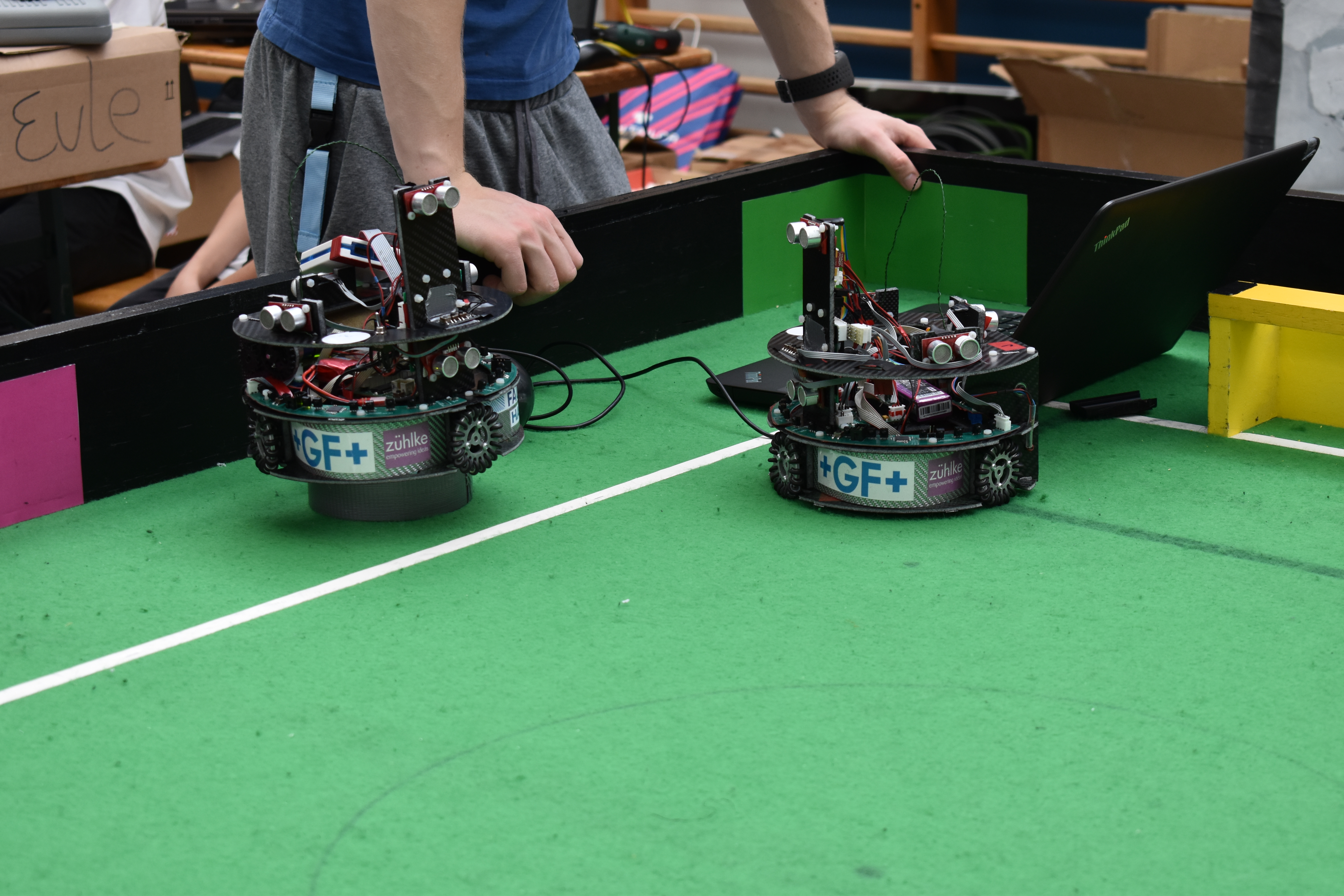
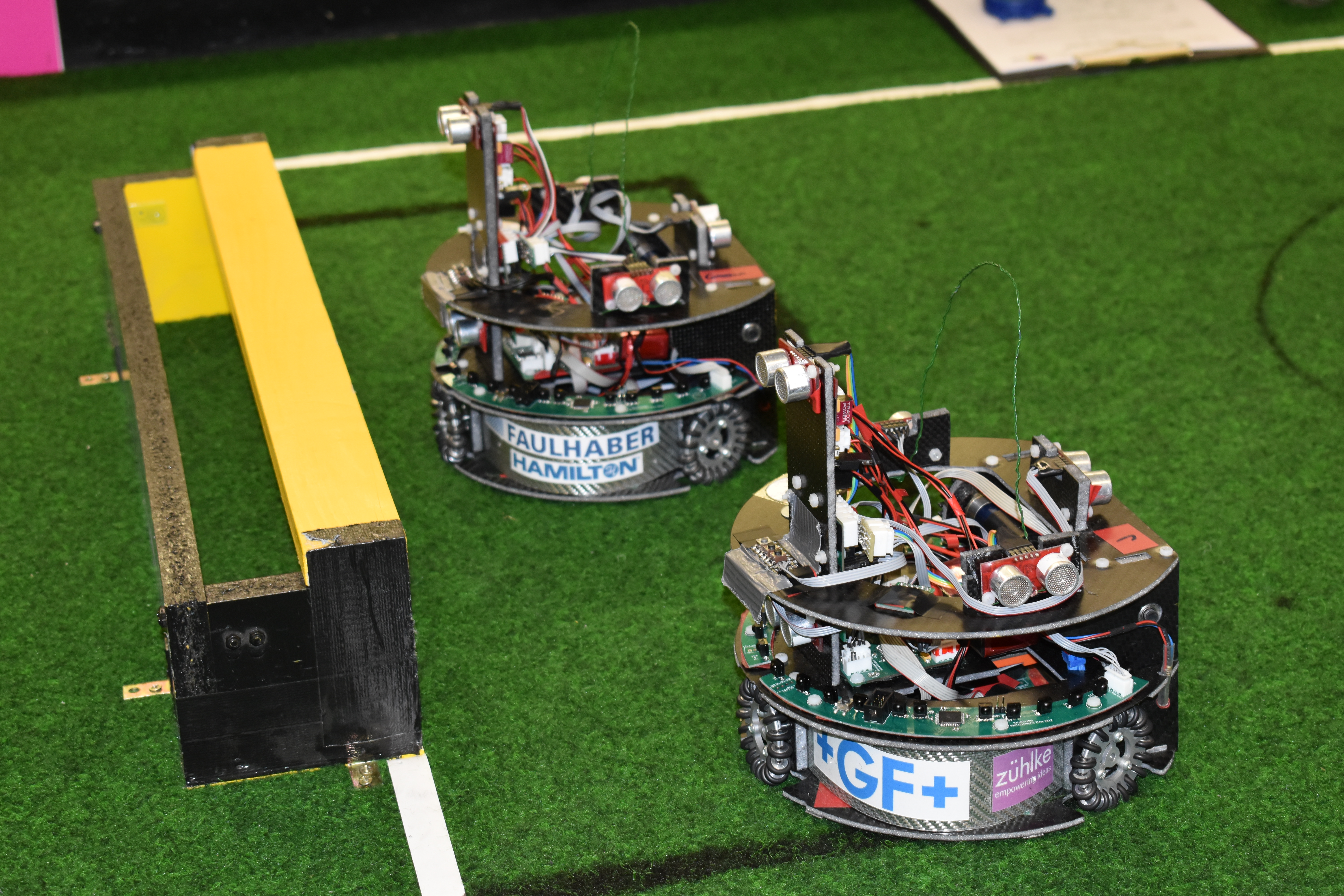
Die Roboter des WM-Teams
Nach einem kurzen konstruktiven Gespräch mit unseren Gegnern machten wir uns ans Zusammenpacken und erwarteten die Siegerehrung. Gross war natürlich die Freude in unserem Team über das gewonnene Match, nicht nur weil es den Turniersieg bedeutete, sondern umso mehr weil wir ein schönes Spiel für uns entscheiden konnten. Es zeigt auch, dass wir auf einem sehr guten Weg sind, ein gutes Resultat an der Weltmeisterschaft in Montreal/Kanada zu erzielen. Nach der Siegerehrung und dem Erhaltenen der Leistungszertifikate mitsamt Siegerpokal ging es für die ganze Helveticrobot-Delegation zurück zum Hotel und danach zum Bahnhof, wo uns eine weitere sechs Stunden Heimfahrt bevorstand. Diese nutzten wir, um nochmals den Wettbewerb und das letzte Spiel zu analysieren um so herauszufinden, wie die Roboter bis zur WM noch verbessert werden können.
Das WM-Team mit Mentor Andrea Cavelti (Mitte) nach dem gewonnenen Final
Für Helveticrobot war dieser Wettbewerb einer der besten Austrian Open, die wir je absolviert haben. Mit neuer Motivation und neuen Ideen bereiten wir uns nun auf die Weltmeisterschaft vor und das Challenge-Team so langsam aufs nächste Jahr.
Das Wm-Team (hinten) und Challenge-Team (vorne)