Unser Nachwuchsteam konnte sich vom 21 bis 22 April mit internationaler Konkurrenz messen. Sie haben sich in weniger als einem halben Jahr darauf vorbereitet und konnten nun ihr erlerntes Wissen anwenden und ihr Können zum Vorschein bringen. So haben sie den ganzen Wettbewerb empfunden:

Das Team (v.l.n.r.): Claudio Nold, Alex Marugg, Gian-Reto Hemmi
Nach einem stärkendem Frühstück sind wir auch schon am Austrian Open angekommen und konnten uns gleich an unserem Platz einrichten. Wir haben für alle Fälle fast die komplette Werkstatt mitgenommen. Dort eingerichtet ging es auch schon los. Wir konnten unseren Roboter in der Test-Arena testen und haben dabei kleinere Fehler bemerkt, welche uns vorher nie aufgefallen sind. Es sind kleinere Probleme in der Software aufgetreten, welche wir versuchten zu lösen. Bei der Problembehebung merkten wir, dass einzelne Lötstellen weniger gut gelötet wurden. Diese mussten wir erneuern. Wir haben unser Bestes gegeben, um diese Probleme zu lösen. Durch einen Bug gelang es uns nicht die Farbsensoren richtig einstellen zu können, da wir unter Zeitdruck lagen und der erste Wertungslauf auch schon vor der Tür stand. Dieser Wertungslauf ging absolut in die Hose. Danach hatten wir noch ein bisschen mehr als eine Stunde Zeit bis zum zweiten Wertungslauf. Wir gaben aber mit der Hoffnung nicht auf, da sowieso nur di zwei besten Läufe gezählt werden. Der zweite Wertungslauf war schon besser, verlief aber leider auch nicht wunschgemäss.

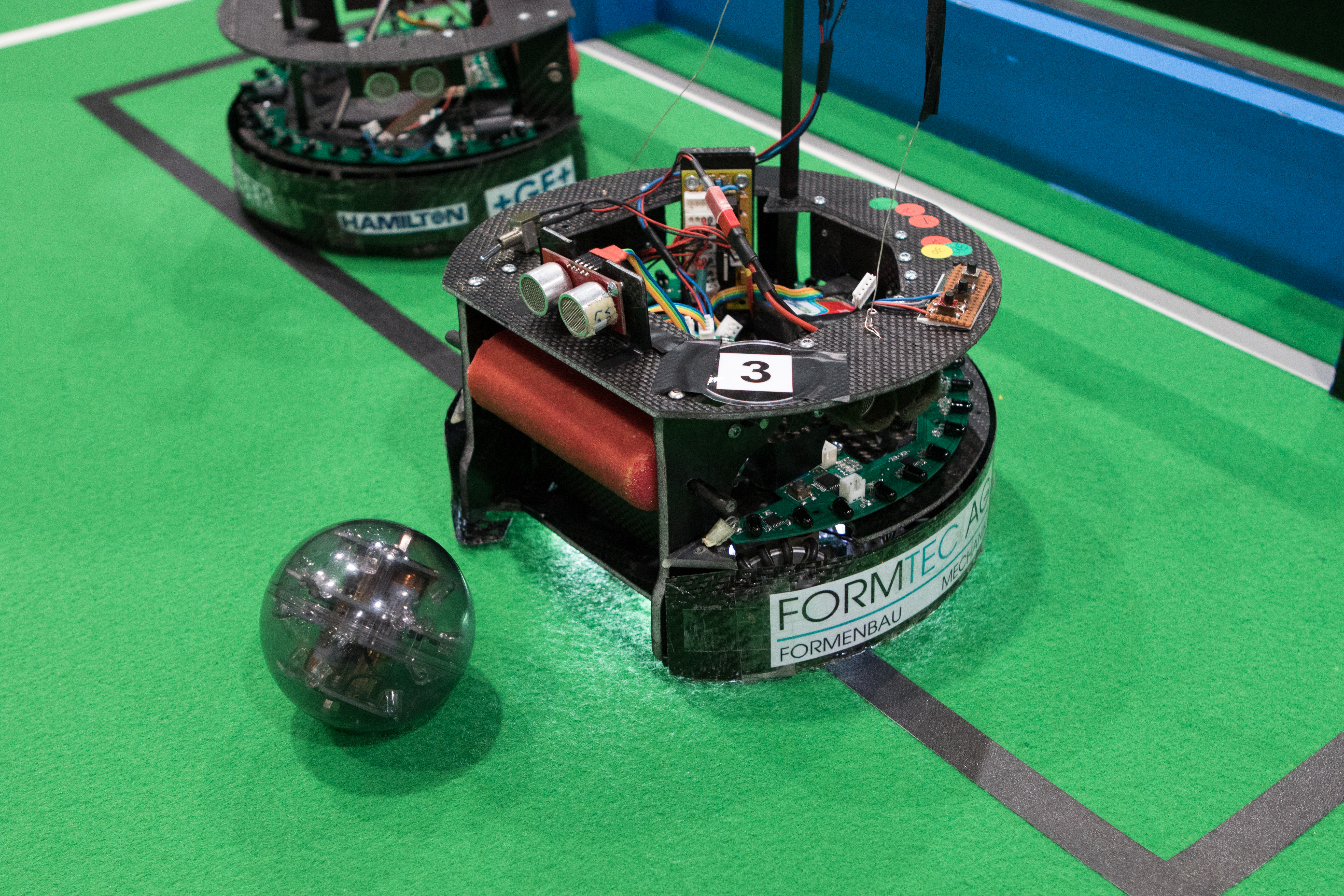
Das Team bei der Arbeit
Die Niederlage schmetterten wir aber gleich wieder weg und durch aufmunternde Worte unserer Coachs hatten wir neue Energie und Willensstärke getankt. Wir verbrachten den restlichen Nachmittag und den ganzen Abend damit die Roboter zu reparieren und sie wieder auf Vordermann zu bringen. Wir konzentrierten uns vor allem auf die Linienfolge, da diese immer wieder andere Schwierigkeiten aufweist, wie zum Beispiel das Umfahren von Gegenständen oder durch Unterbrechungen gezeichnete Linie. Durch die harte Arbeit und unser Zusammenhalt konnten wir den letzten Lauf meistern. Es war ein Erfolgserlebnis für uns und wir waren sehr glücklich, dass es doch geklappt hat. Wir platzierten uns zwar nur im dritten Viertel der Rangliste, konnten aber viel Erfahrung mitnehmen, wie es unter realistischen Bedingungen ablaufen kann. Eine uns wichtige Erkenntnis war es, sich besser über den genauen Aufbau der Spielfelder zu informieren. Wir freuen uns auf die nächste Challenge.

Eine intensive Besprechung um den Roboter